第八章:全部参数表设置
其他参数更多是在“全部参数表”里面进行针对性设置,这是ardupilot固件最具有特点地方。
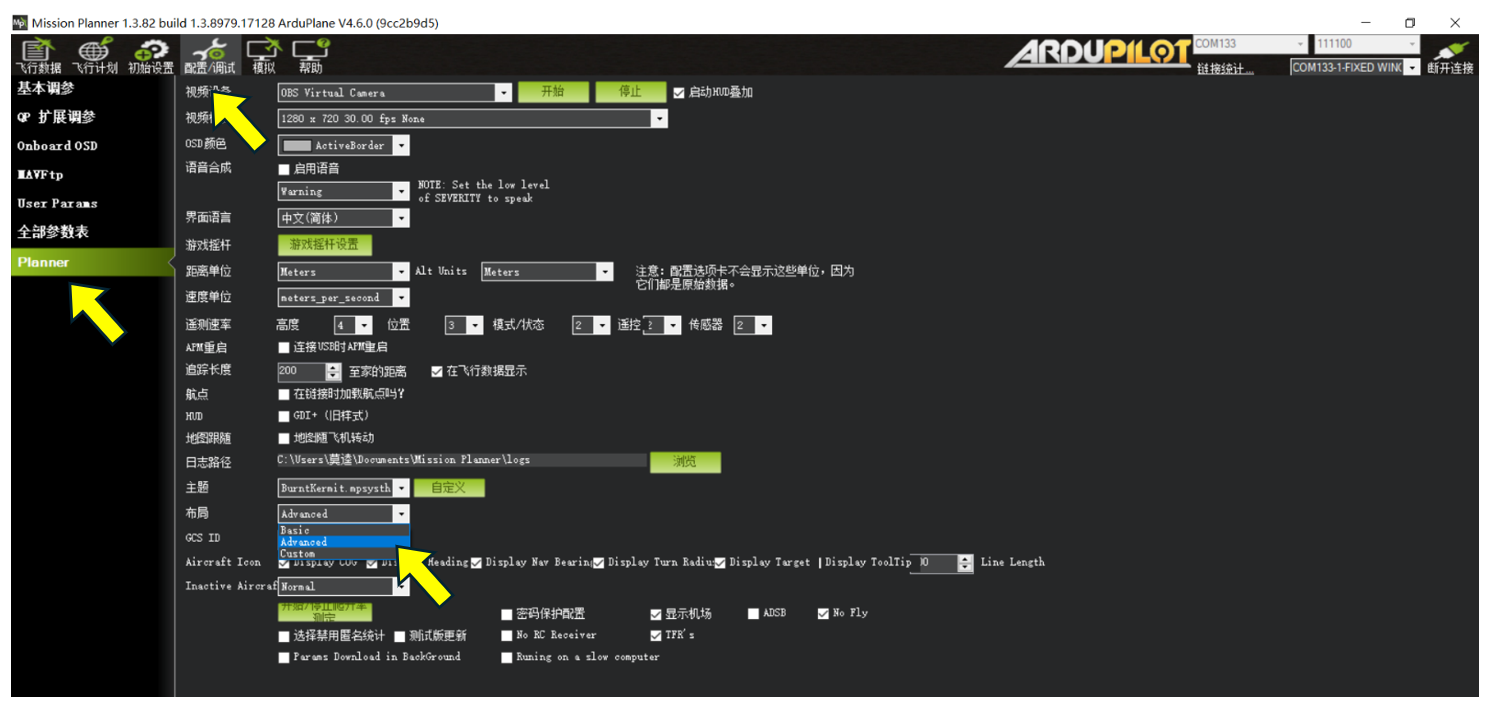
部分安装了MissionPlanner调参软件的用户在软件界面中找不到“全部参数表”项目,可以在“配置/调试”页面下的“Planner”页面下的“布局”项目,选择“Advanecd”,然后保存,关闭软件,重新打开并连接飞控,即可找到“全部参数表”项目页。如下图
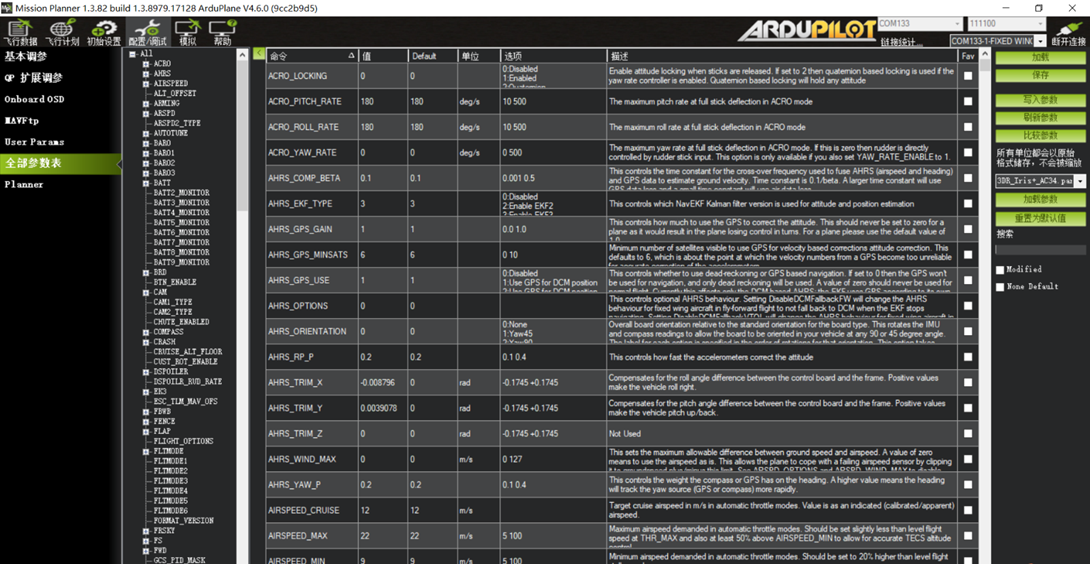
使用全部参数表,建议在电脑同步打开调参手稿TXT文件
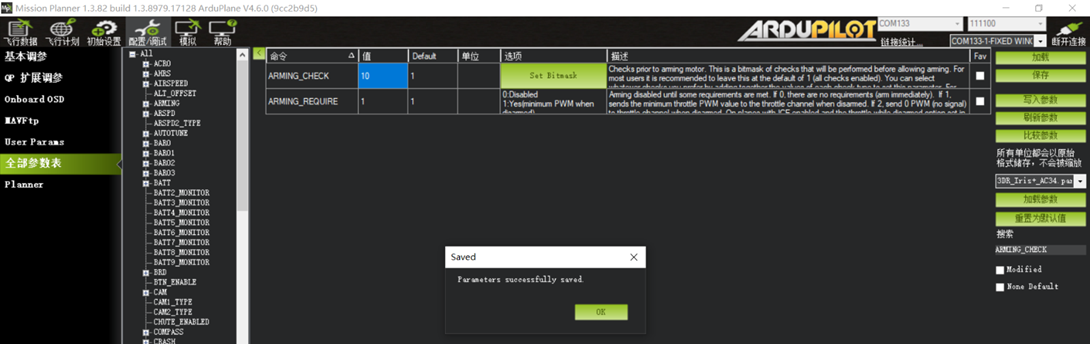
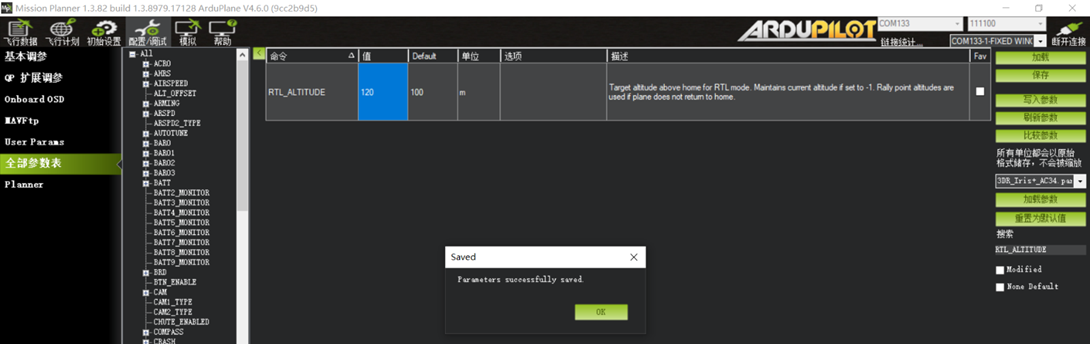
直接复制手稿里的关键参数名字,粘贴到全部参数表右侧的“搜索”框里,主页面会自动刷新出对应的参数的当前值,以及该参数的单位、选项、阐述(全英文,可复制到翻译软件或者AI进行解释)。我们需要修改的是对应参数的“值”这列。输入修改的参数值后,点击右侧“写入参数”,部分命令会弹出对话框,关闭或者忽略即可,弹出“Parameters successfully saved”对话框,点击OK即可。此时你要修改的命令的值已经完成更新。
部分参数生效需要重启飞控。
第1节 解锁自检ARMING_CHECK 及上锁ARMING_RUDDER
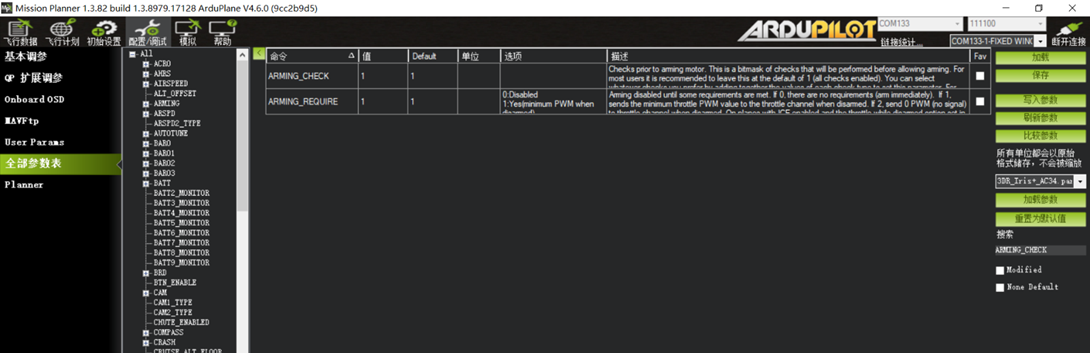
Ardupilot固件对飞控解锁要求非常高,默认参数需要自检数十项参数后达标才允许解锁,非常麻烦。(搜索ARMING)
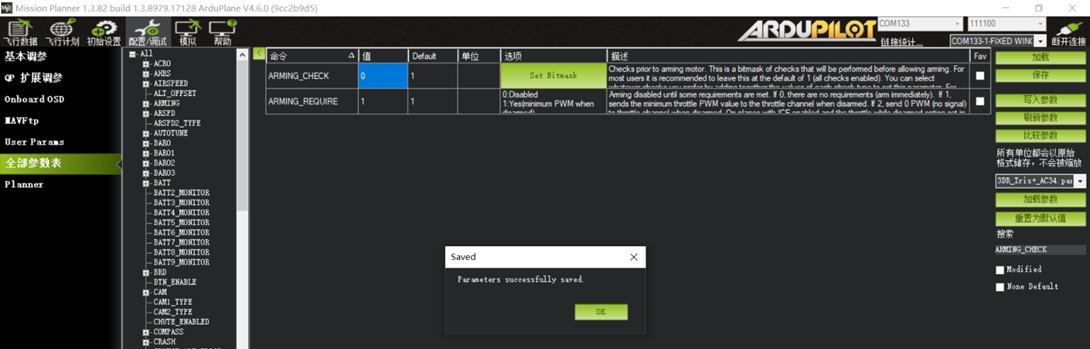
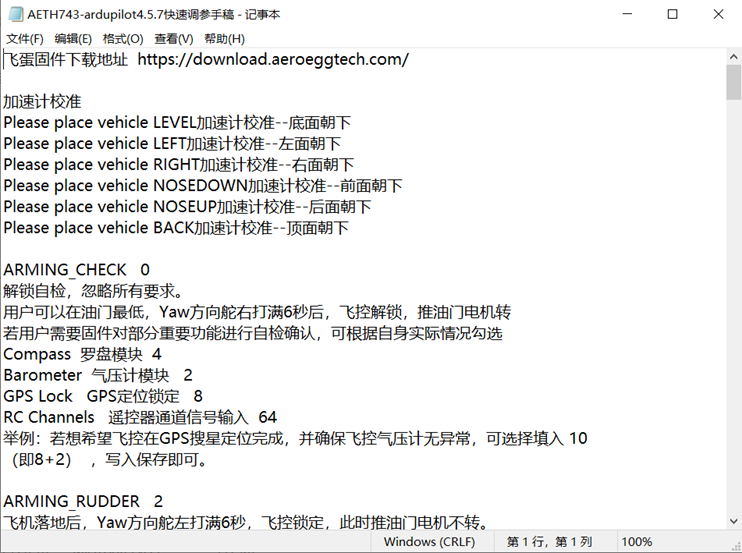
ARMING_CHECK 0 (此处会弹出对话框,关闭即可)
解锁自检,忽略所有要求。非自动油门模式下(FBWA模式,Manual模式)可以在油门最低,Yaw方向舵右打满6秒后,飞控解锁,推油门电机转。 有自动控制油门的模式(RTL模式,CRUISE模式,Lotier模式等)无法解锁
若用户需要固件对部分重要功能进行自检确认,可根据自身实际情况勾选
Compass 罗盘模块 4
Barometer 气压计模块 2
GPS Lock GPS定位锁定 8
RC Channels 遥控器通道信号输入 64
举例:若想希望飞控在GPS搜星定位完成,并确保飞控气压计无异常,可选择填入 10 (即8+2) ,写入保存即可。
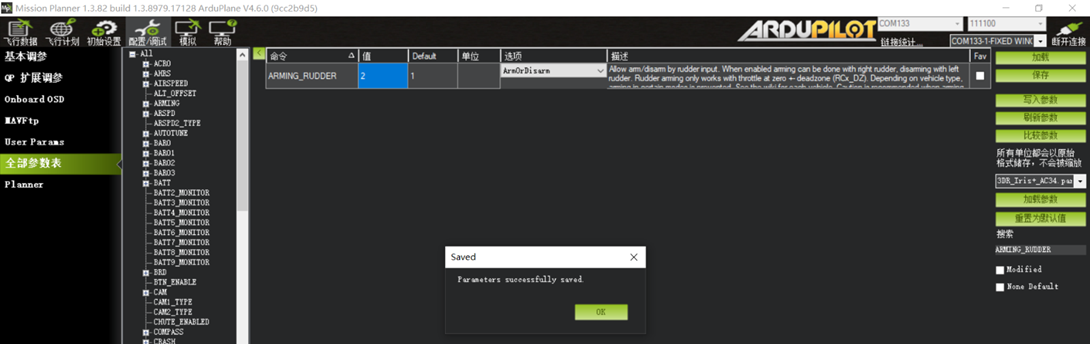
设置参数 ARMING_RUDDER 2 飞机落地后,Yaw方向舵左打满6秒,飞控锁定,此时推油门电机不转。
第2节,设置图传OSD相关参数
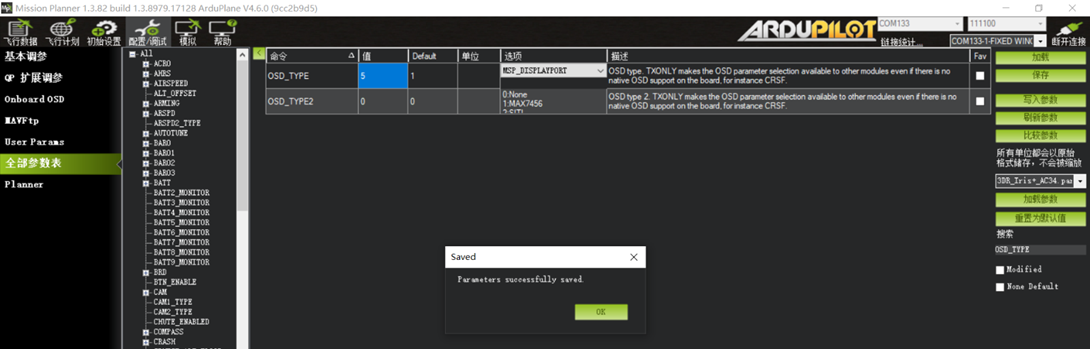
OSD_TYPE
此参数主要适应图传的OSD显示模式,
常见的模拟5.8G图传,该参数保持默认1即可
使用MSP_Displayport模式的数字图传(大疆G2/G3/N3眼镜适配的天空端、蜗牛Avatar系列天空端、开源OpenIPC数字高清天空端),该参数设置为 5
使用老款大疆高清眼镜V1/V2对应Vista及原厂双天线天空端,该参数设置为 3
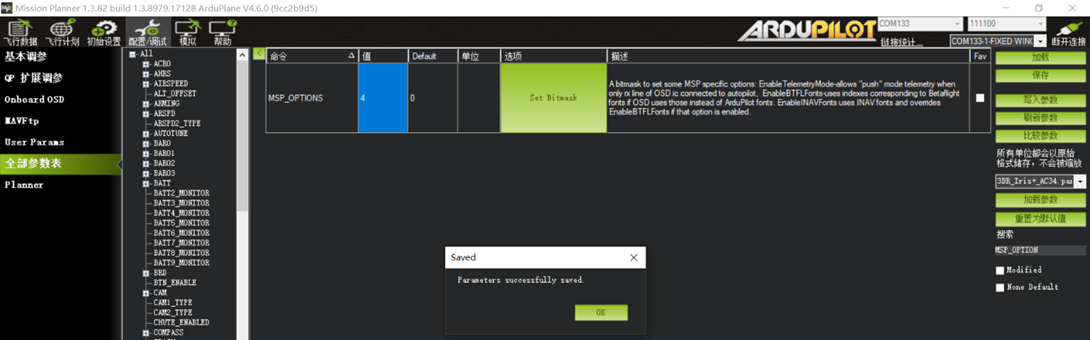
MSP_OPTIONS 4 使用大疆G2/G3/N3眼镜适配的天空端,需要设置该参数
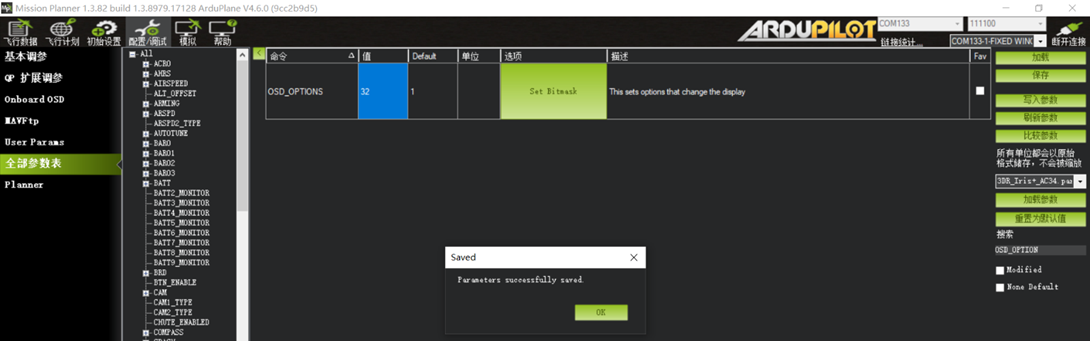
OSD_OPTION 32
使用大疆G2/G3/N3眼镜适配的天空端,需要设置该参数。
使用Openipc开源数字天空端,该参数为 42
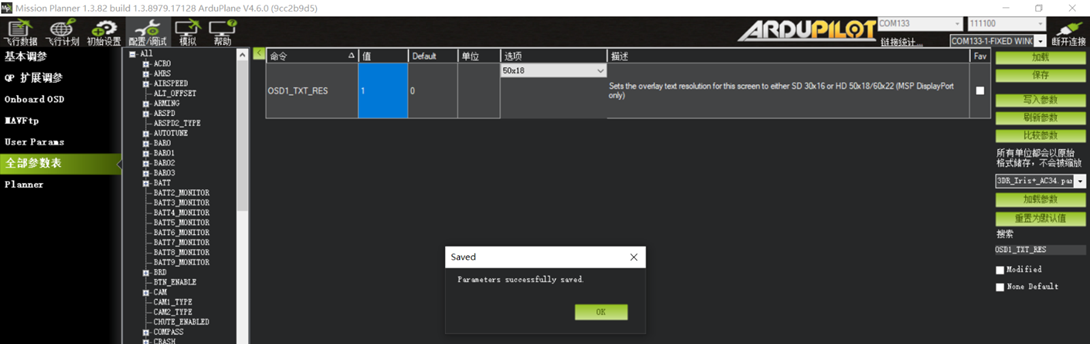
OSD1_TXT_RES 1
此参数主要为调整OSD显示的分辨率布局,高清图传均建议设置
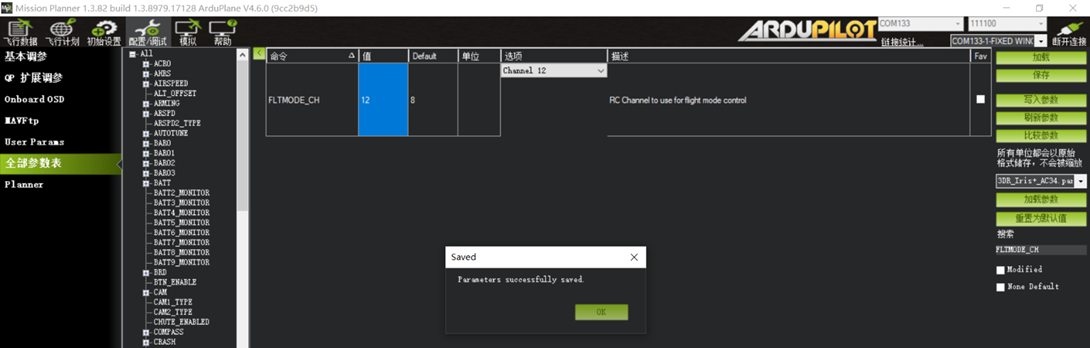
第3节,修改默认6段模式切换的通道 FLTMODE_CH
固件默认8通道作为飞控模式切换通道,只需要在遥控设置8通道为6段开关用于模式切换。使用ELRS接收机,请使用ELRS3.X及以上固件版本,100hzFull模式或者333HzFull模式 ,该参数可保留默认8 ,即使用8通道作为模式切换)
如需要修改使用其他通道作为6段模式切换通道,例如使用12通道作为模式切换,FLTMODE_CH 12 选择12通道作为模式切换通道(将12通道设置位6端模式开关)
第4节,修改FBWA模式下最大允许姿态角度值
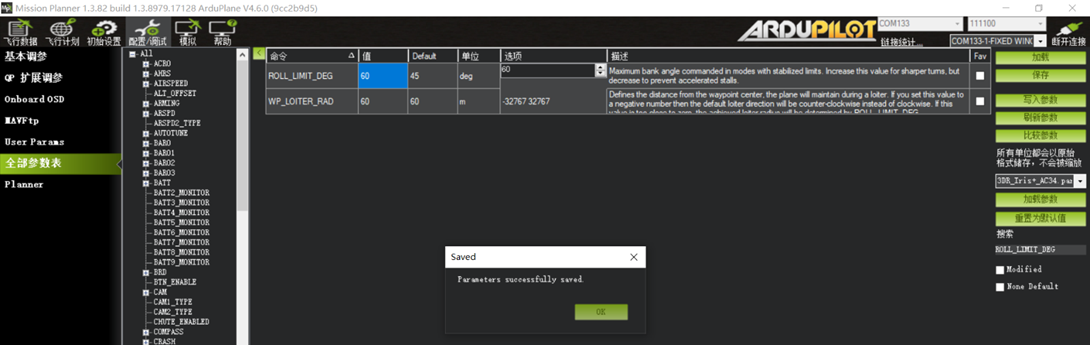
ROLL_LIMIT_DEG 60 FBWA模式下横滚最大比例角度 默认45 。
建议修改至60,修改此项,降低FBWA模式下横滚转弯的半径
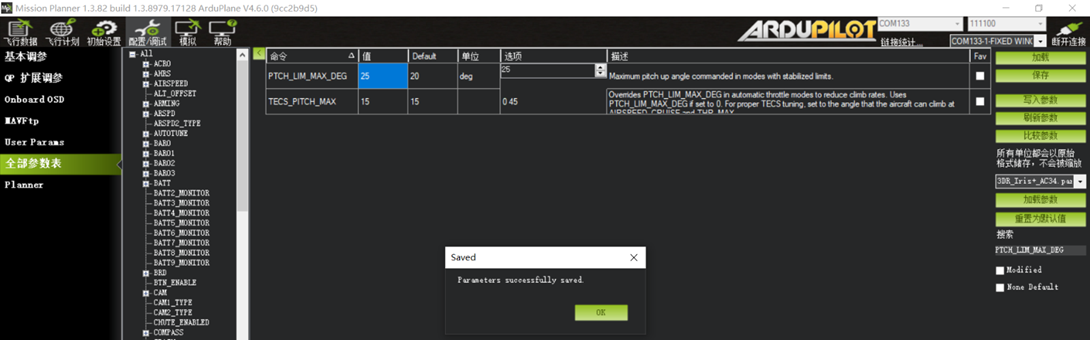
PTCH_LIM_MAX_DEG 35 FBWA模式下俯仰最大比例角度
默认20 建议修改至35,修改此项,降低FBWA模式下爬升倾角,提高爬升速率
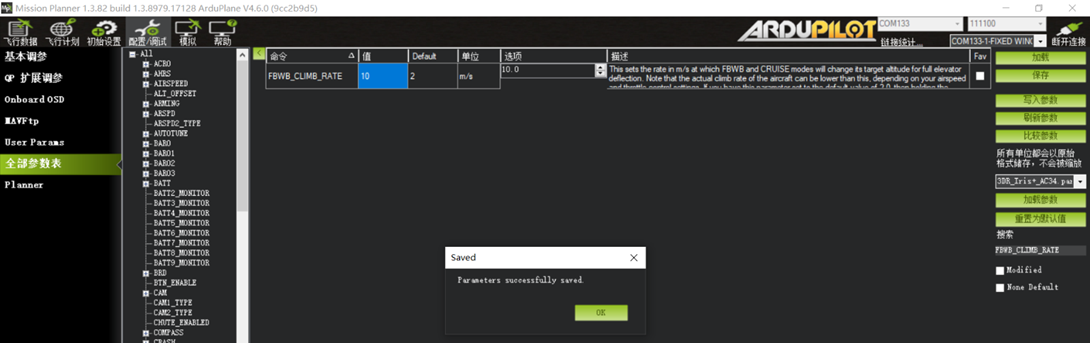
FBWB_CLIMB_RATE 4 110m/s CRUISE 定高定向模式是远航常用的飞行模式,默认参数中允许玩家爬升的速率比较低,仅2M/s,玩家可根据飞机动力搭配的特点,适当修改此参数。在执行定高定向模式时,遥控输出俯仰拉升动作,飞机能根据设定的爬升速率进行快速爬升。推荐510m/s。参数如下
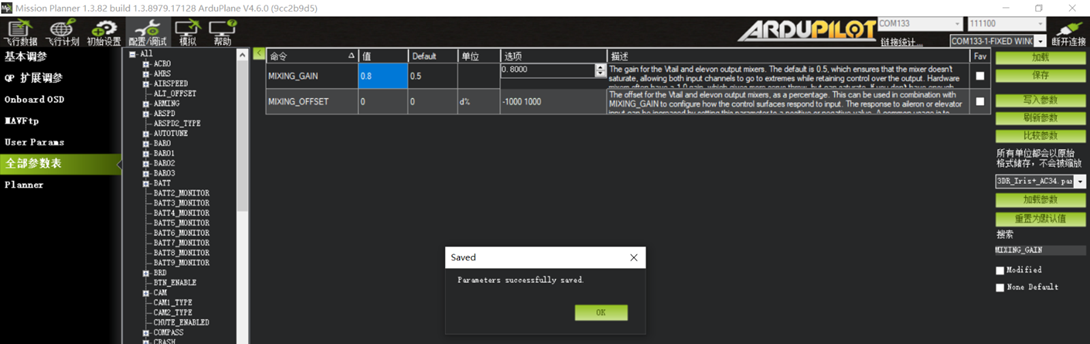
第5节,调整使用混控机型的舵面允许角度 MIXING
安装飞翼机型(使用副翼升降混控)、V尾机型(使用升降方向混控)。
飞控默认参数允许的舵面动作比较小。可以通过修改MIXING_GAIN参数的值增大舵面动作量。默认0.5。可以适当调整为0.8或 1。
第6节,独立通道开关切换模式(搭配第49页)
用户可以使用独立的遥控通道开关单独设置一个模式控制。每一个常用的模式都有对应的参数值。如下:
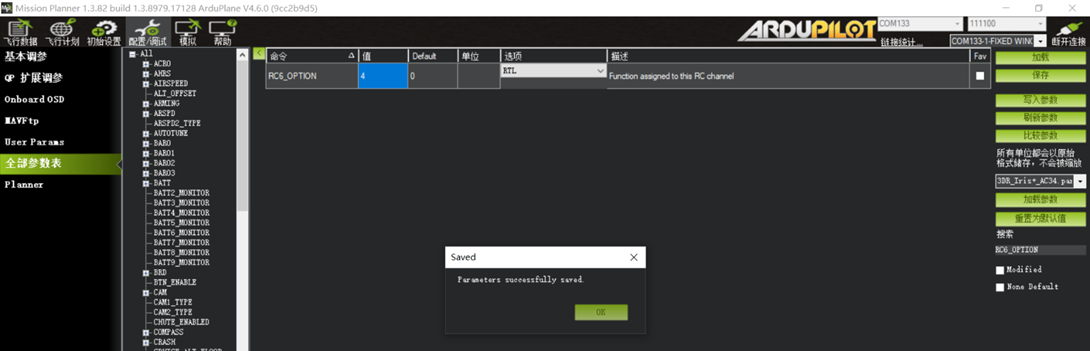
4 : ModeRTL 返航模式
16 : ModeAuto 航点模式
51 : ModeManual 手动模式
56 : ModeLoiter 定点留待模式
58 : Clear Waypoints 航点清除
72 : ModeCircle 盘旋模式
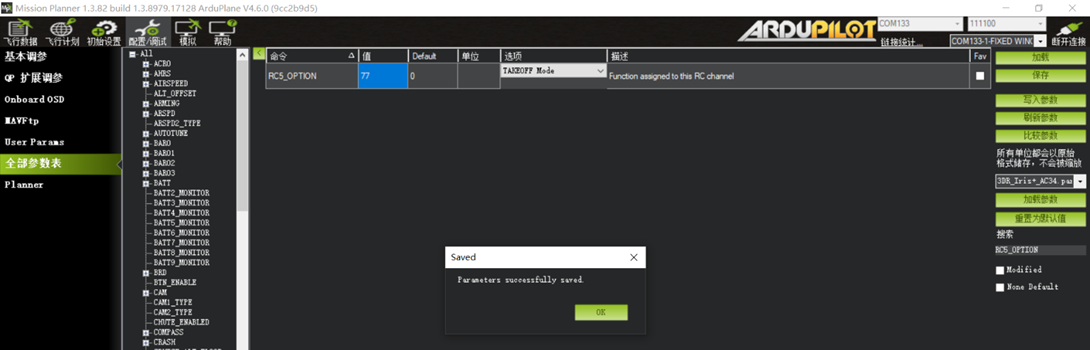
77 : ModeTakeoff 抛飞模式
92 : FBWA 增稳模式
150 : CRUISE 定高定向模式
153 : ArmDisarm开关一键解锁
举例:
使用遥控5通道的2段开关作为TAKEOFF抛飞模式开关,全部参数表中查找 RC5_OPTION 选择 77
使用遥控6通道的2段开关作为RTL返航模式开关 全部参数表中查找 RC6_OPTION 选择 4
第7节,TAKEOFF抛飞模式相关参数设置 TK
TAKEOFF抛飞模式是FPV手抛试载机非常实用的起飞模式。在设定对应的模式开关切入后,我们可以针对性的修改抛飞模式中的一些参数。
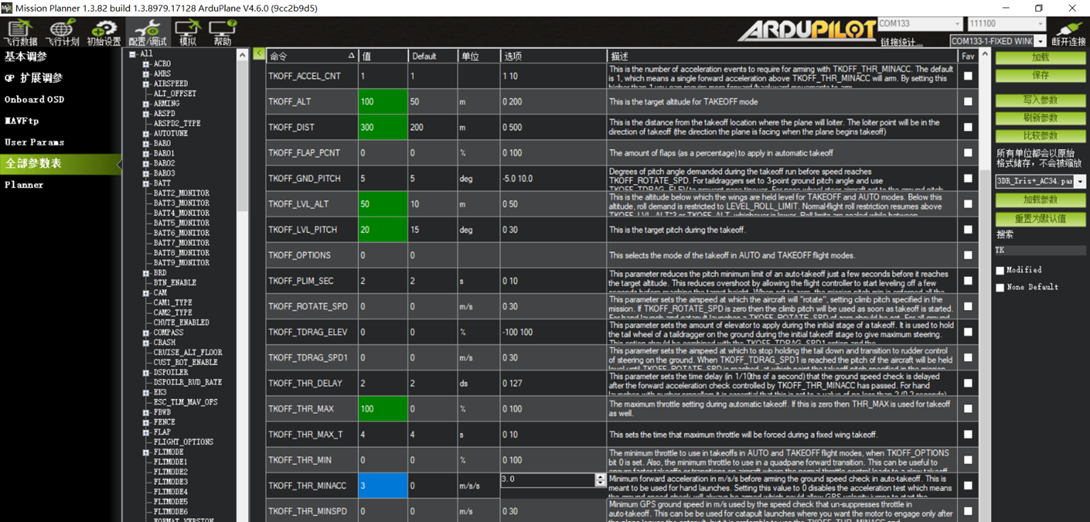
建议修改参数:
TKOFF_ALT 100 (设置起飞模式目标到达指定高度100米)
TKOFF_DIST 300 (设置起飞模式最大范围 300米)
TKOFF_LVL_ALT 50 (抛飞后到达第一阶段高度机翼保持水平,默认20)
TKOFF_LVL_PITCH 20 (设置起飞模式最大爬升角度 20°)
TKOFF_THR_MAX 100 (设置起飞模式最大油门值100%)
TKOFF_THR_MINACC 3 (起飞模式飞控检测飞机瞬间速度达到3米/秒,油门输出)
TAKEOFF模式必须在有GPS定位成功,且确保飞控解锁成功后才能启用。
第8节,失控保护相关参数设置 FS(非常重要)
Ardupilot固件的失控保护逻辑,为飞控未检测到接收机给飞控输出的油门值低于1000,飞控则执行失控保护动作(熟悉inav或者bf的玩家应该清楚,遥控未与接收机连接,或者飞控未检测到接收机,油门值会固定在885),飞控默认固件在失控保护比较保守,所以建议用户执行一次失控保护检查。如下图:(搜索FS)
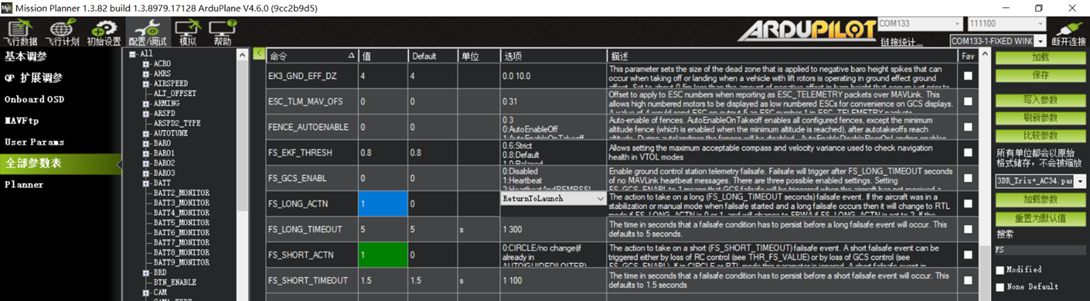
FS_SHORT_TIMEOUT 1.5 (失去接收机油门输出信号1.5秒后,飞控执行第一阶段失控保护动作)
FS_SHORT_ACTN 1 (第一阶段失控保护动作,执行CIRCLE盘旋等待。默认为0“不执行任何动作”)
FS_LONG_TIMEOUT 5 (执行第一阶段失控保护动作5秒内,没有接受到油门输出信号,飞控执行第二阶段失控保护动作)
FS_LONG_ACTH 1 (第二阶段失控保护动作,执行RTH返航。默认为0“执行当前动作”)
第9节,返航盘旋等待参数
Ardupilot固件默认返航点盘旋等待高度为100米高,玩家可根据各自飞场的不同地理情况进行调整。RTL返航逻辑为在返航点与起飞点以直线飞行,一边返航一边降低高度。
高度不足预设高度会自动快速爬升至指定高度执行返航。
修改返航高度参数如下:
RTL_ALTITUDE 120 m 默认 100m RTL至起飞点后盘旋高度。 此参数设置为-1,则以飞机当前高度定高返航至起飞点上空盘旋等待。
飞机返航到起飞点上空后进行盘旋等待,相关盘旋参数也可以进行修改设置。 WP_LOITER_RAD 80 留待模式盘旋半径,默认60m
参数为正数+,飞机盘旋时做顺时针盘旋,参数为负数-,飞机盘旋时做逆时针盘旋。(此参数设置的盘旋半径,通用与RTL返航模式,Loiter定点留待模式的盘旋半径值)
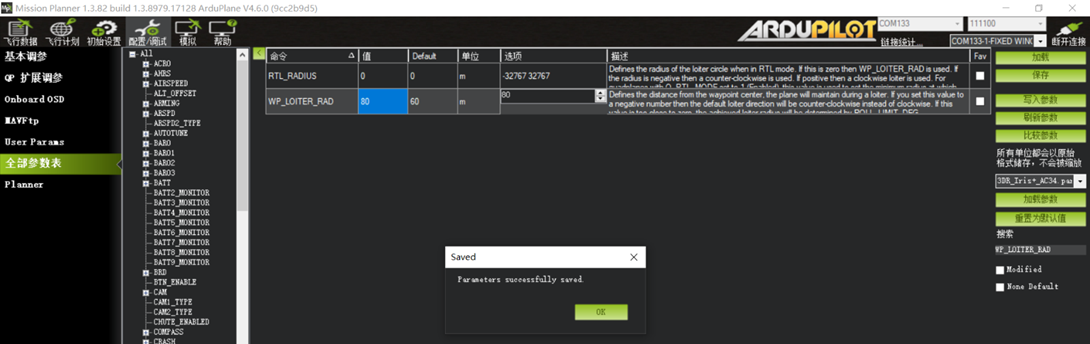
如上一段半径80米盘旋一圈控制在40秒,这样飞机盘旋的油门及速度相对效率较高。
第10节,飞控安装朝向修改 AHRS_ORIENTATION
部分玩家根据自己的载机机舱布局情况,无法使用默认水平安装飞控。特别是一些象真机改FPV载机,机型本身未预留飞控安装位置,需要将飞控粘贴在机舱侧面(侧置安装)或者黏贴在机舱底部(倒置安装)。我们需要通过调整AHRS_ORIENTATION的值来修改飞控的安装角度
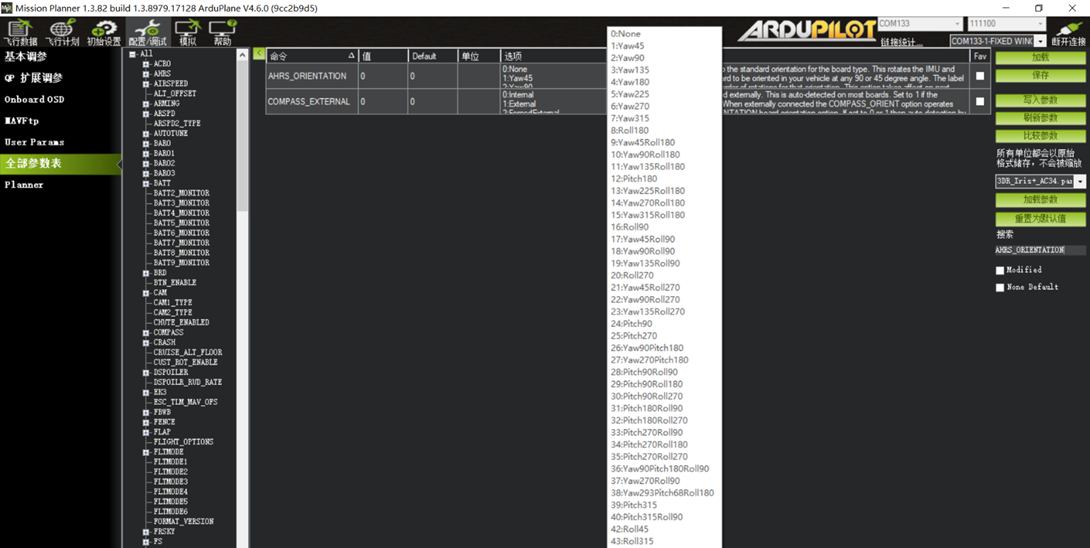
举例1:飞控的主电源出线方向(默认机头方向)朝后,即飞控前后反向安装,则该参数值修改为4。(YAW 180)
举例2:飞控底部黏贴在机舱侧面,即飞控相当于ROLL轴翻转90度或270度,则该参数值为 16 或 20 。
举例3:剑鱼载机,需要倒置安装飞控且原飞控默认机头方向朝后,则为ROLL180 加上YAW180,在参数中并无对应选项,实际观察可以使用PITCH 180也能实现此安装调整。 则该参数值为12