第四章 全部参数表

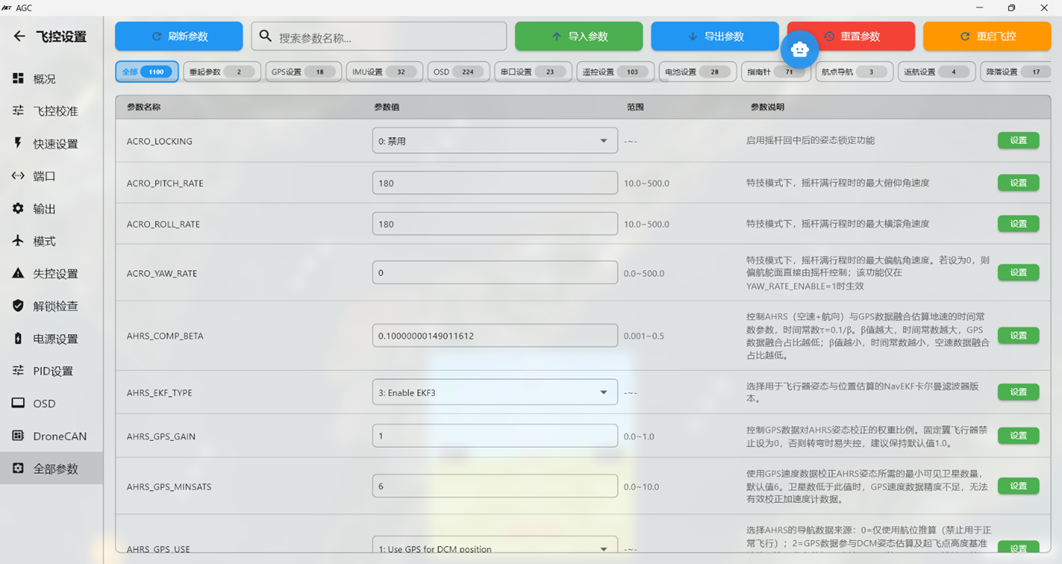
使用全部参数表,建议在电脑同步打开调参手稿TXT文件
直接复制手稿里的关键参数名字,粘贴到全部参数表右侧的“搜索”框里,主页面会自动刷新出对应的参数的当前值,以及该参数的单位、选项、阐述(全英文,可复制到翻译软件或者AI进行解释)
AGC内的ai很好用的强烈推荐!!!
部分参数生效需要重启飞控。
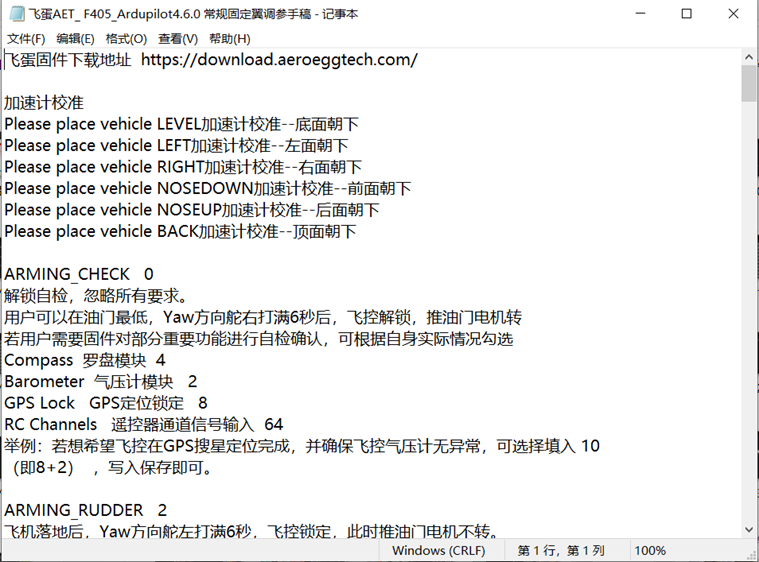
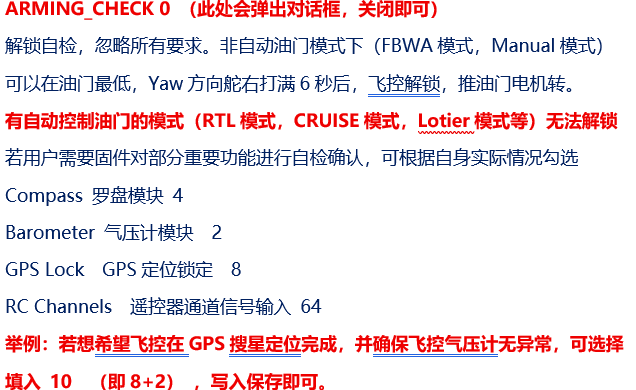
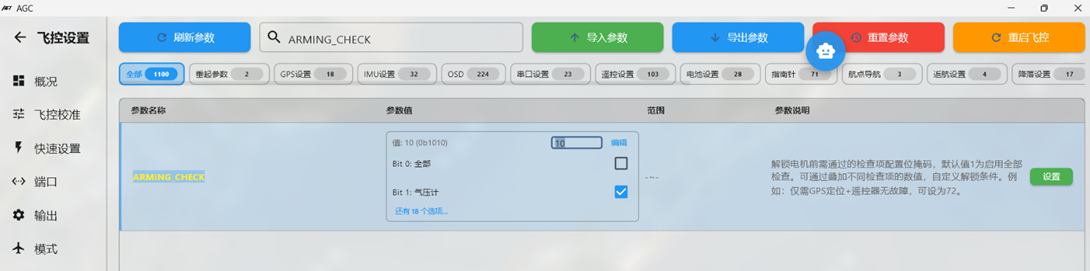
第1节 解锁自检ARMING_CHECK 及上锁ARMING_RUDDER Ardupilot固件对飞控解锁要求非常高,默认参数需要自检数十项参数后达标才允许解锁,非常麻烦。(搜索ARMING)




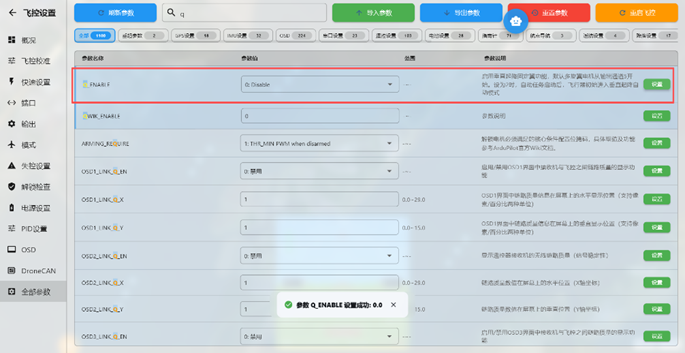
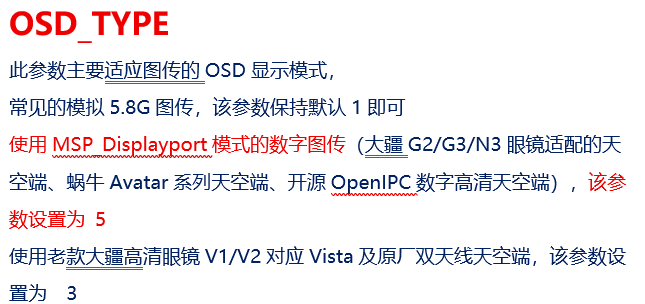
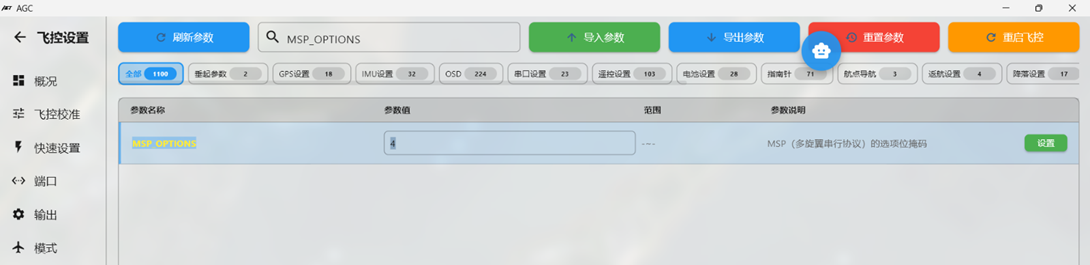
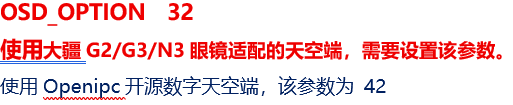
第2节,设置图传OSD相关参数





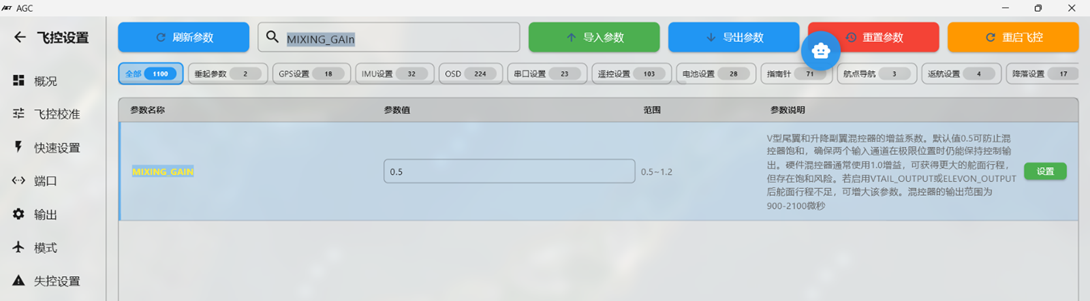
第5节,调整使用混控机型的舵面允许角度 MIXING
安装飞翼机型(使用副翼升降混控)、V尾机型(使用升降方向混控)。飞控默认参数允许的舵面动作比较小。可以通过修改MIXING_GAIN参数的值增大舵面动作量。默认0.5。可以适当调整为0.8或 1。

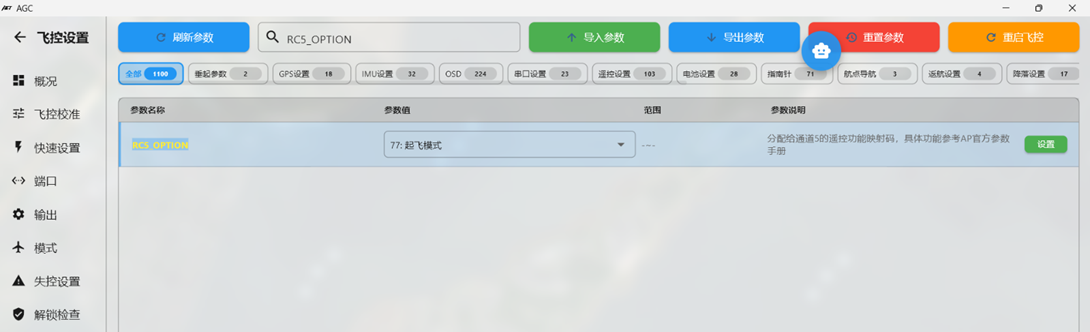
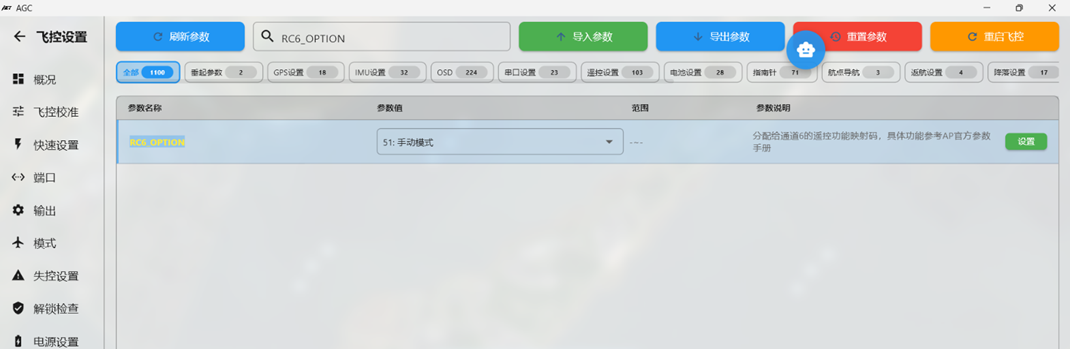
使用遥控6通道的2段开关作为RTL返航模式开关 全部参数表中查找 RC6_OPTION 选择 4

使用遥控7通道的2段开关作为Manual手动模式开关 全部参数表中查找 RC6_OPTION 选择 51
第7节,TAKEOFF抛飞模式相关参数设置 TK
TAKEOFF抛飞模式是FPV手抛试载机非常实用的起飞模式。在设定对应的模式开关切入后,我们可以针对性的修改抛飞模式中的一些参数。
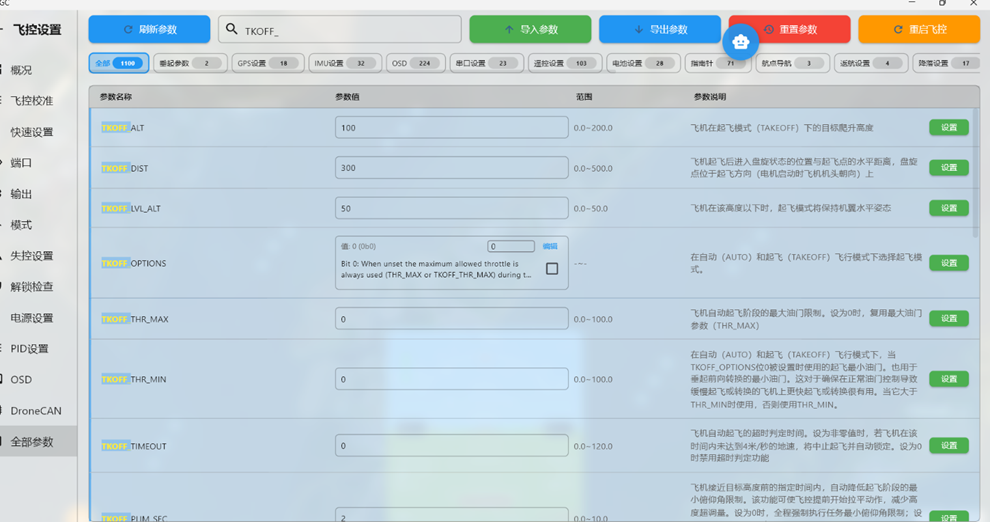
建议修改参数:
TKOFF_ALT 100 (设置起飞模式目标到达指定高度100米)
TKOFF_DIST 300 (设置起飞模式最大范围 300米)
TKOFF_LVL_ALT 50 (抛飞后到达第一阶段高度机翼保持水平,默认20)
TKOFF_LVL_PITCH 20 (设置起飞模式最大爬升角度 20°)
TKOFF_THR_MAX 100 (设置起飞模式最大油门值100%)
TKOFF_THR_MINACC 3 (起飞模式飞控检测飞机瞬间速度达到3米/秒,油门输出)
TAKEOFF模式必须在有GPS定位成功,且确保飞控解锁成功后才能启用。
第9节,返航盘旋等待参数
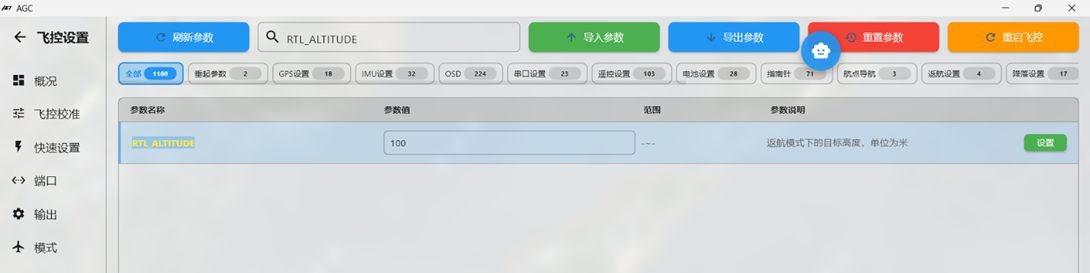
Ardupilot固件默认返航点盘旋等待高度为100米高,玩家可根据各自飞场的不同地理情况进行调整。RTL返航逻辑为在返航点与起飞点以直线飞行,一边返航一边降低高度。 高度不足预设高度会自动快速爬升至指定高度执行返航。 修改返航高度参数如下: RTL_ALTITUDE 120 m 默认 100m RTL至起飞点后盘旋高度。 此参数设置为-1,则以飞机当前高度定高返航至起飞点上空盘旋等待。
飞机返航到起飞点上空后进行盘旋等待,相关盘旋参数也可以进行修改设置。 WP_LOITER_RAD 80 留待模式盘旋半径,默认60m
参数为正数+,飞机盘旋时做顺时针盘旋,参数为负数-,飞机盘旋时做逆时针盘旋。(此参数设置的盘旋半径,通用与RTL返航模式,Loiter定点留待模式的盘旋半径值)
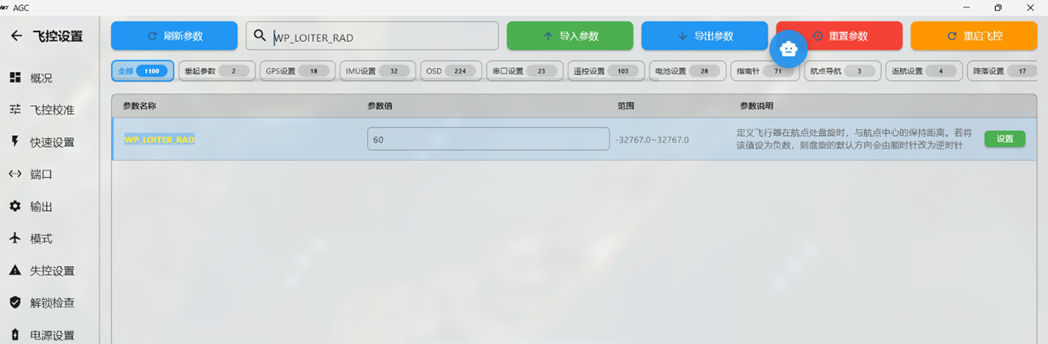
如上一段半径80米盘旋一圈控制在40秒,这样飞机盘旋的油门及速度相对效率较高。

第10节,飞控安装朝向修改 AHRS_ORIENTATION
部分玩家根据自己的载机机舱布局情况,无法使用默认水平安装飞控。特别是一些象真机改FPV载机,机型本身未预留飞控安装位置,需要将飞控粘贴在机舱侧面(侧置安装)或者黏贴在机舱底部(倒置安装)。我们需要通过调整AHRS_ORIENTATION的值来修改飞控的安装角度
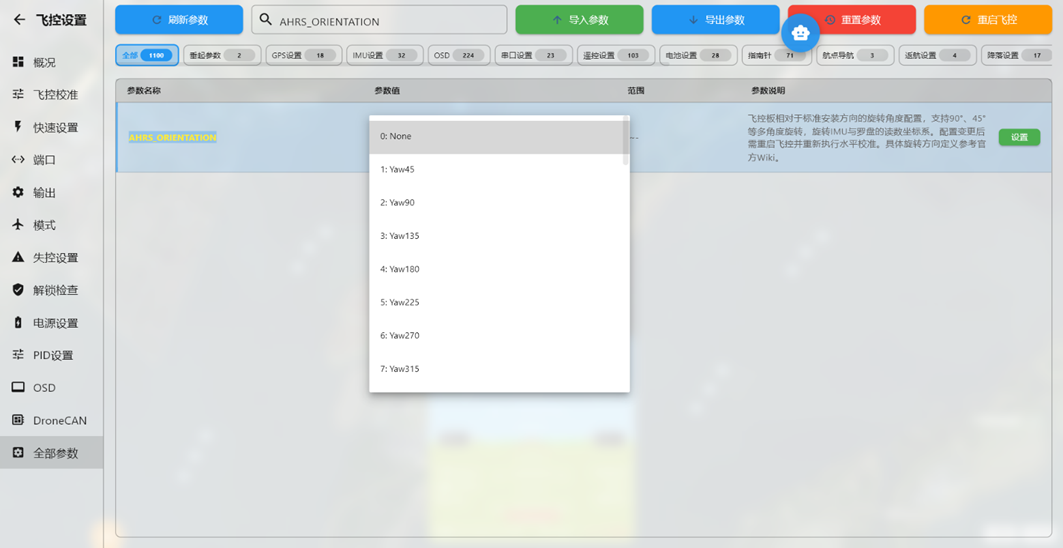
举例1:飞控的主电源出线方向(默认机头方向)朝后,即飞控前后反向安装,则该参数值修改为4。(YAW 180)
举例2:飞控底部黏贴在机舱侧面,即飞控相当于ROLL轴翻转90度或270度,则该参数值为 16 或 20 。
举例3:剑鱼载机,需要倒置安装飞控且原飞控默认机头方向朝后,则为ROLL180 加上YAW180,在参数中并无对应选项,实际观察可以使用PITCH 180也能实现此安装调整。 则该参数值为12