飞蛋AET-H743-BASIC使用Ardupilot固件Y3调参指南
(文章以刺客T1为例,如为别的飞机需根据实际情况调整飞控参数)
1.基本设置
以飞翼为例调试时,使用USB连接飞行控制器和电脑。在右上角选择COM端口并设定波特率为115200,然后点击链接按钮建立连接。这样您可以开始进行调试工作。
1.1飞控校准
进入初始设置,找到必要硬件,点击加速度计校准。
此校准至关重要,影响飞机是否能平稳飞行的关键
进行加速度校准时务必将飞控单独拿出进行校准,每做完一个姿态点击一次完成。
进行加速度校准时务必将飞控单独拿出进行校准,每做完一个姿态点击一次完成。
进行加速度校准时务必将飞控单独拿出进行校准,每做完一个姿态点击一次完成。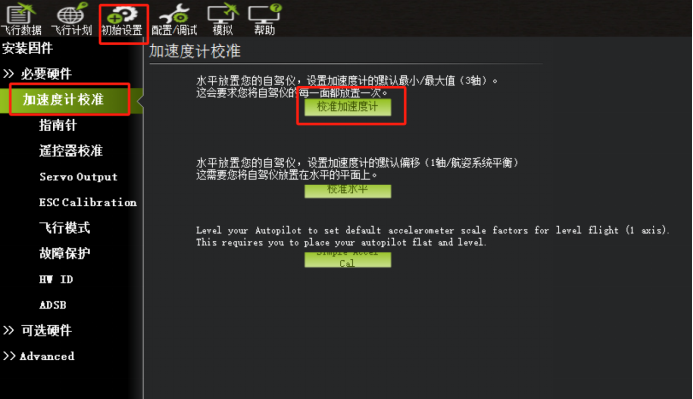
点击校准加速度计后,它将变为“完成时点击”。在下方将会弹出关于如何放置飞控进行六面校准的提示。每完成一个动作,点击上方按钮即可,这将跳转到下一个动作的提示。这个流程会引导您逐步完成飞控六面校准的步骤;
在飞控装机后,飞机平放,然后点击“校准水平”执行一次校准即可。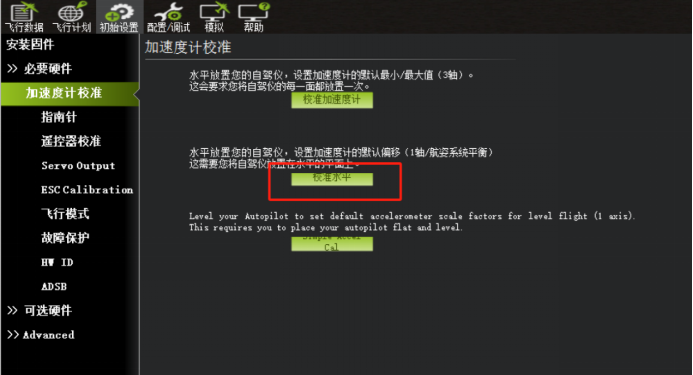
1.2.罗盘校准
点击进入指南针界面,GPS和罗盘安装详细请看说明书;
点击校准罗盘后,会在下方显示一个进度条。您需要将飞机沿各轴进行旋转,直到进度条完全填满。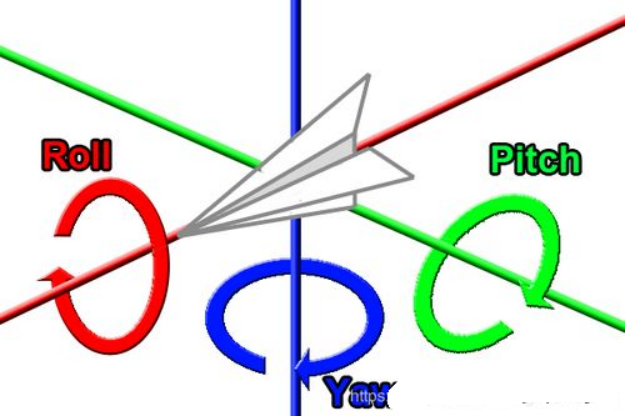
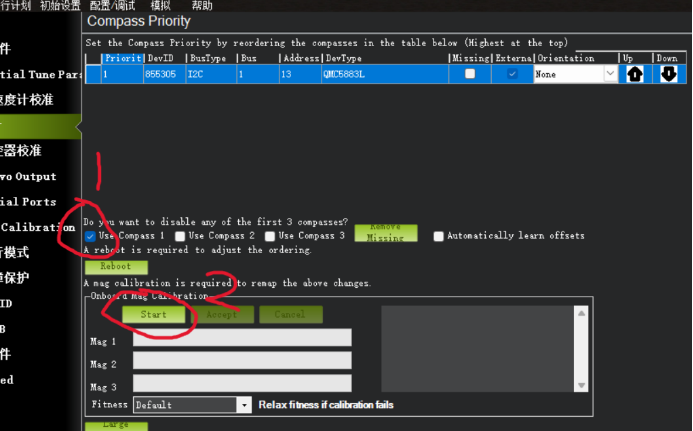
此时系统会提示罗盘校准完成,需要重新启动飞控。点击REBOOT,重启完成校准过程。(校准罗盘需在室外至少搜到8颗星的情况下进行)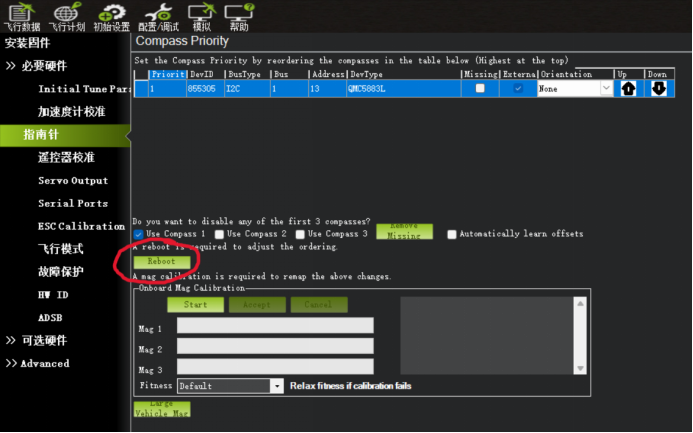
进行垂起飞行请务必开启罗盘,并校准设置正确,否则多轴状态下飞机稳定性差,操作难度高,且有可能出现不必要的风险。
2.遥控器设置
2.1.遥控器校准
遥控器校准界面需要参考说明书进行详细的接线和设置。 确保遥控器的通道与飞控的通道一致,无反向问题:
进入遥控器校准界面
遥控器打左滚时,ROLL值向左偏移;
遥控器打右滚时,ROLL值向右偏移
油门向上推杆时,THR值增加
油门向下拉杆时,THR值减小
打左偏航时,YAW值向左偏移
打右偏航时,YAW值向右偏移
注意:遥控器的拉杆操作中,俯仰(PITCH)通道与其他通道的逻辑是反向的,当向下拉杆时,PITCH值应往上增加,反之亦然。如有不是,选择是否勾选反转。
请务必保证遥控器打杆以及校准界面输出值与上述文字及图片保持一致
请务必保证遥控器打杆以及校准界面输出值与上述文字及图片保持一致
请务必保证遥控器打杆以及校准界面输出值与上述文字及图片保持一致
(这一步的检查目的是确保遥控器输出与飞控输出一致,否则飞控逻辑有可能混乱)
对于使用Futaba、天地飞等遥控器的用户,如遇到遥控器通道油门反向等情况,同上处理。
点击校准遥控时,请确保将所有通道的遥杆和开关推至最大位置,以显示通道输出的最大和最小值。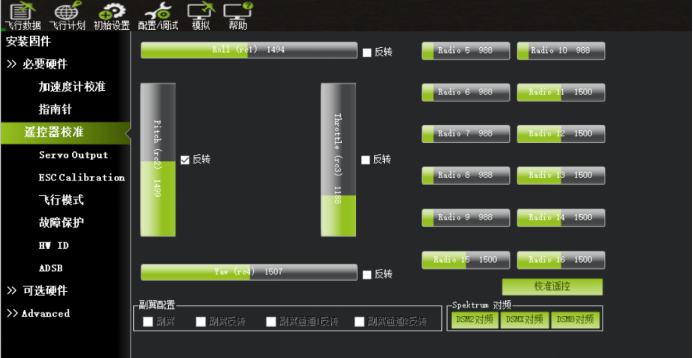
校准完毕后点击“完成时点击”
弹出此界面即可完成遥控器校准。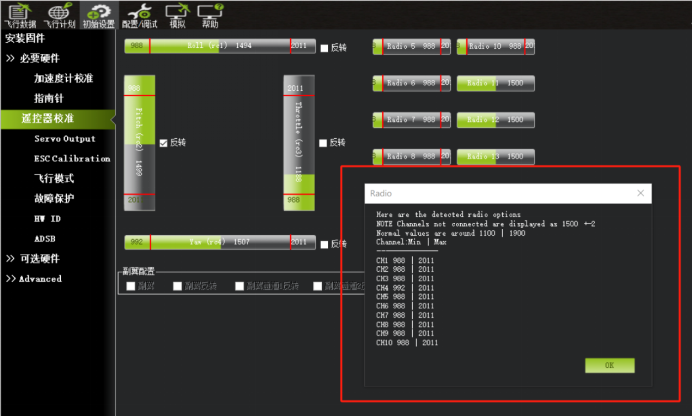
3.垂起设置
3.1垂起预调参
打开全部参数树搜索并设置Q_ENABLE =1
开启vtol模式,=1为打开, 默认是=0 关闭的 设置完这个 垂起部分的参数才会出现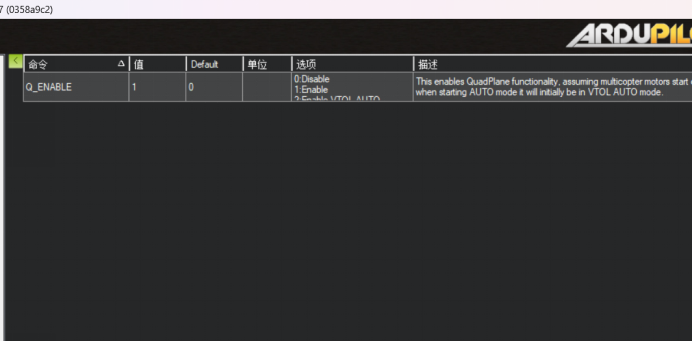
然后地面站会要求你重新加载参数,这个时候要完全给飞控断电重启,重连地面站,并继续修改
QFRAMECLASS=7
多轴类型 Y3=7
QFRAMETYPE=1
机架类型,改成X型就行 通常=1
QTILTENABLE=1
开启倾转 不开的话下面的MASK和TYPE是没有的 更改=1
然后地面站会要求重新加载参数,这个时候要完全给飞控断电重启重连地面站,并继续修改
QTILTTYPE=2
启动矢量推力控制:0关闭1单倾转 2矢量控制倾转 更改=2
QTILTMASK=3
倾转的电机,是特殊进制的代码 更改=3
3.2.飞行模式设置
进入飞行模式设置,通过下拉菜单选择适合的模式,根据个人偏好进行设置。我们建议首先设置Q_stabilize模式类似多轴的半自稳和固定翼自稳模式(FBWA),以便继续调试。
默认情况下,飞行模式设置在通道8上。如果使用三段开关,将飞行模式1和2设为相同的模式即可。以下是模式设置的示意图,仅供参考。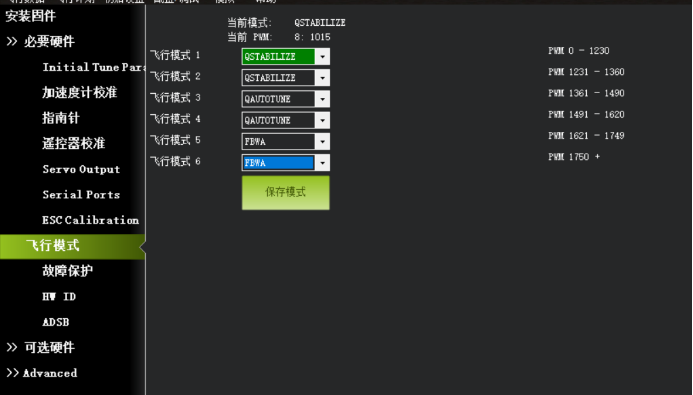
完成后点击保存模式-Complete;
如需使用6段开关控制,可参考以下链接: https://doc.aeroeggtech.com/books/aet-h743-basic-ardupilot/page/aet-h743-ardupilot
4.常用调参
在调试飞机时,我们经常会因为外设的不同需要改变参数,详细可参考说明书,所有的参数我们都可以在下图所示界面进行搜索并修改所需参数即可,不同的设置因人而异,就不多细述,下面会介绍一些常用的参数,供大家参考。
4.1遥控器通道
在全部参数表中,找到FLTMODE_CH = X(X为任意通道)就可以修改切换飞行模式的通道。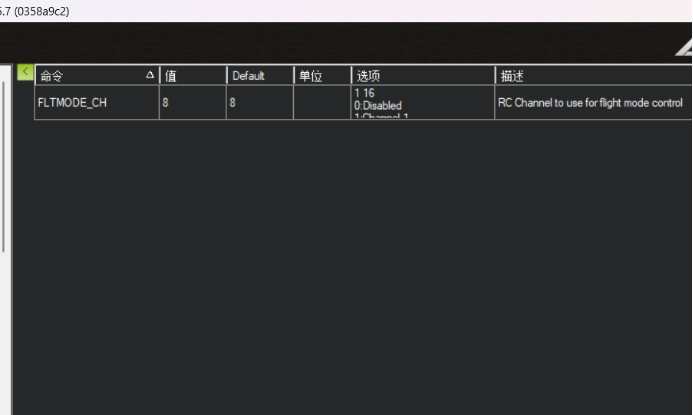
此处设置为6则对应遥控器上自定义6通道的开关
4.2 解锁自检
Ardupilot固件对飞控解锁要求非常高,默认参数需要自检数十项参数后达标才允许解锁,加之我们飞机可能并未加装这么多外设及检查内容,所以我们可通过此参数,去掉一些飞控无法自检的选项。
先搜索ARMING
找到ARMING_CHECK 1(此处会弹出对话框,根据实际情况关闭无法过检的参数即可,
例如我飞机没装储存卡,无法过自检,我们就需要将对话框中Logging Available取消勾选。
否则飞机是无法通过自检起飞的。)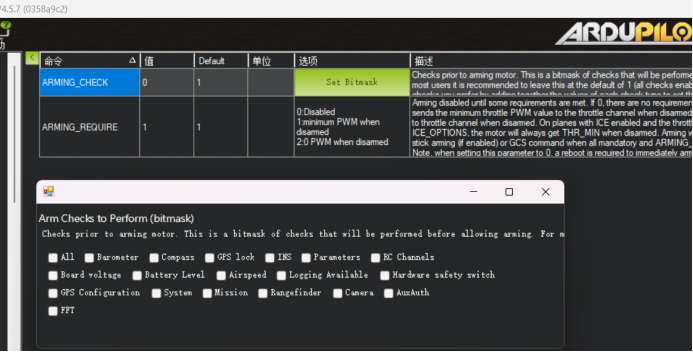
重点
无论选择哪种解决方案,请不要直接将ArmingCheck参数设置为0。相反,您可以禁用无效的故障报告,例如由于缺少MicroSD卡或指南针警告(指南针不健康)而导致的日志记录失败。 完成罗盘校准并确保消息报告显示“EKF3 active”后,您可以起飞,如仅有DCM ACTIVE,请勿起飞。
可以通过OSD的提示看到,也可以USB连接飞控后,在MP地面站中信息栏中看到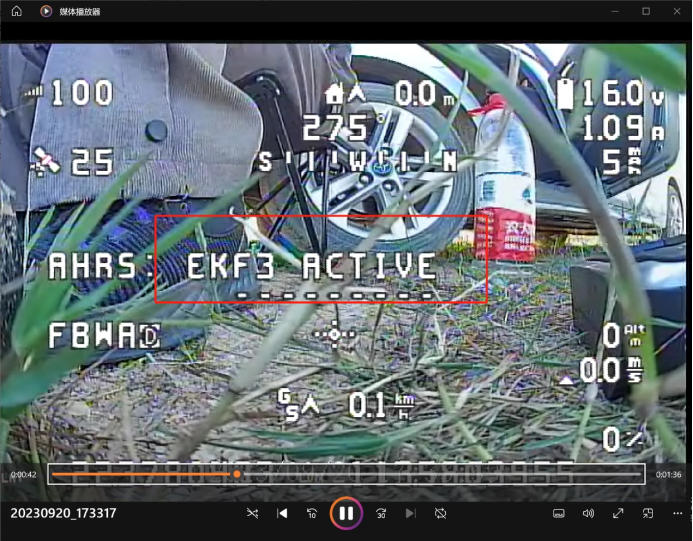
(上图仅作演示用,其他错误报告请忽略)
5.输出设置
5.1通道配置
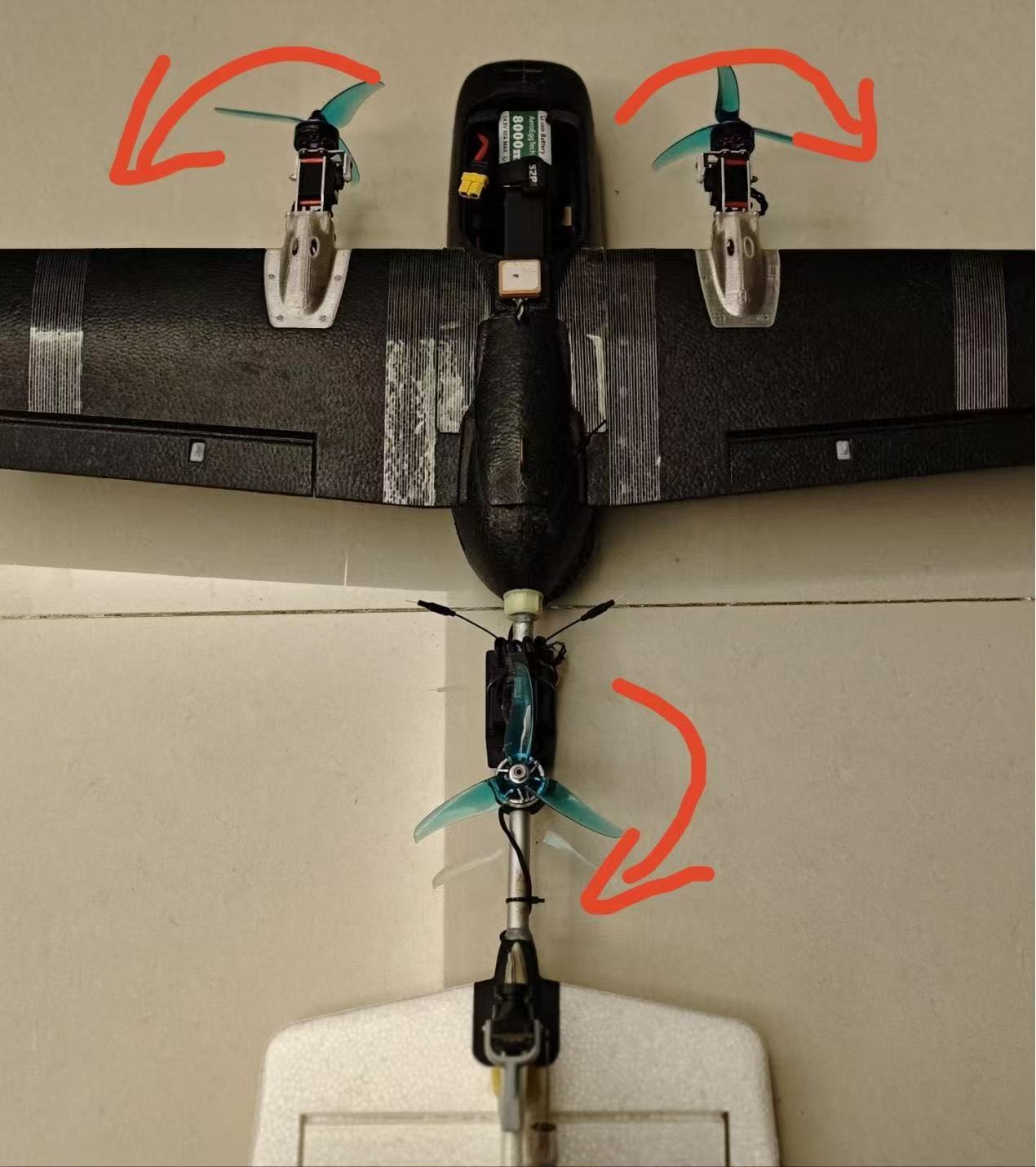
进入SERVO OUTPUT我们可以对飞控各通道进行设置,AP固件参考的是多轴Y-3的电机定义,需注意左前电机为MOTOR2,右前电机为MOTOR1,后电机为MOTOR4,如下图所示,转向可以不做参考,切不可设置成MOTO1\MOTOR2\MOTOR3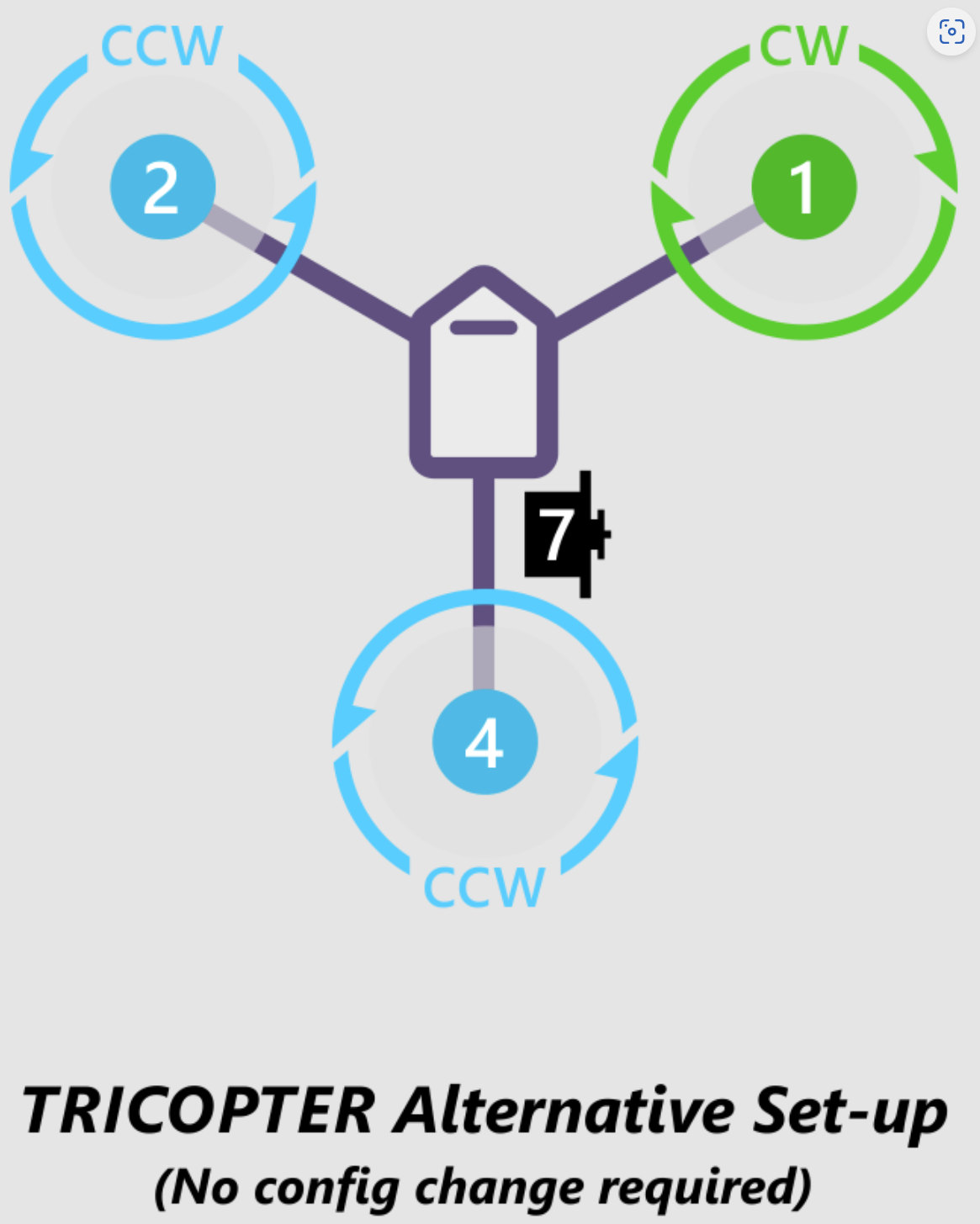
以我目前所调试的刺客T1为例,根据我个人在飞控端的接线;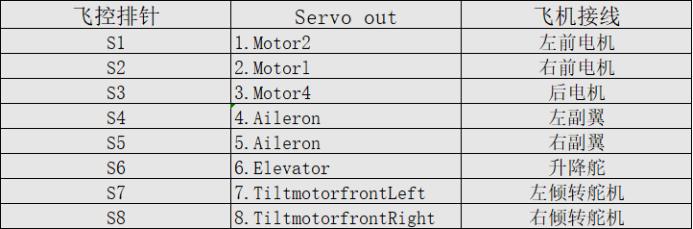
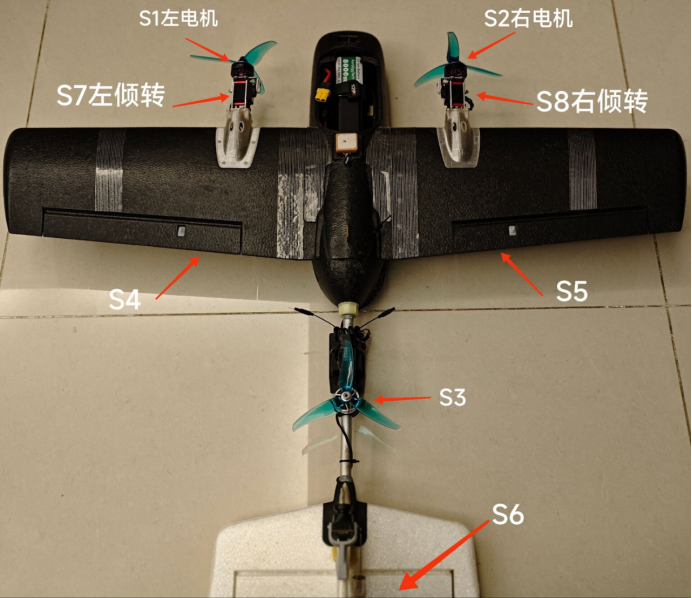
(飞控自带BEC,如电调也自带BEC需把中间电压线挑出来并做好绝缘,防止飞行途中晃动导致接触到导体,导致短路)
根据接线选择以下通道,作为飞机舵面及油门。
5.2.舵机及舵面检查
5.2.1倾转舵机检查
当我们处于Q_stabilize模式时,两个倾转舵机的角度应该是垂直90度的,如下图所示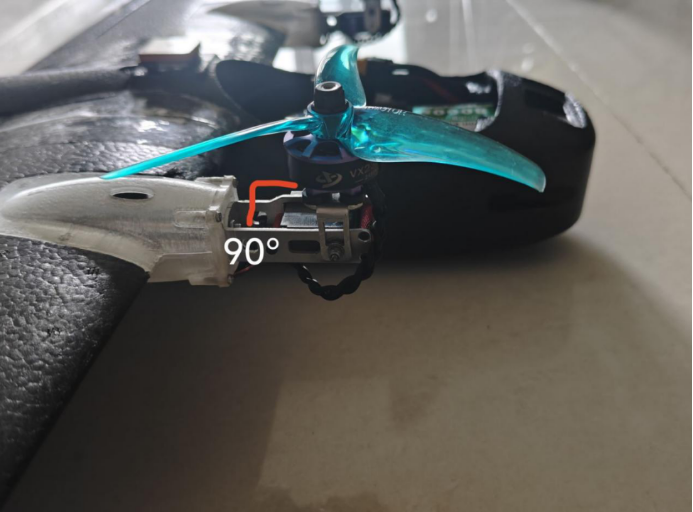
地面站OUTPUT界面如下图所示,我们可以看到在Q_stabilize模式时,左倾转舵机的PWM值是处于低位,右倾转舵机的PWM值处于高位。
这个根据实际情况去调整,不一定每一台飞机在多轴模式下左倾转舵机PWM值都是处于低位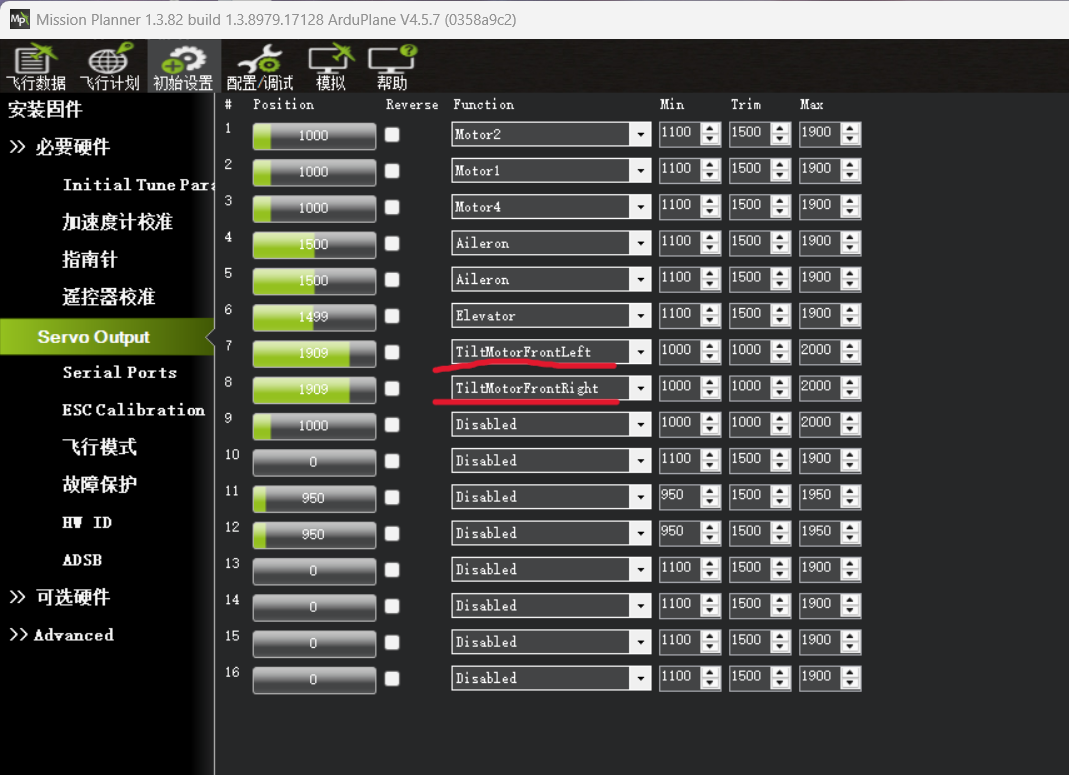
当出现一个舵机垂直90°,另一个舵机平行180°时,只需将错误的舵机对应的通道勾选 Reverse(反向)即可。 当两个倾转舵机都处于竖起来,但是没有完全垂直的情况下,通过调整7通道的min值和8通道max值调至垂直
示例:
当做左倾转舵机不垂直切小于90度时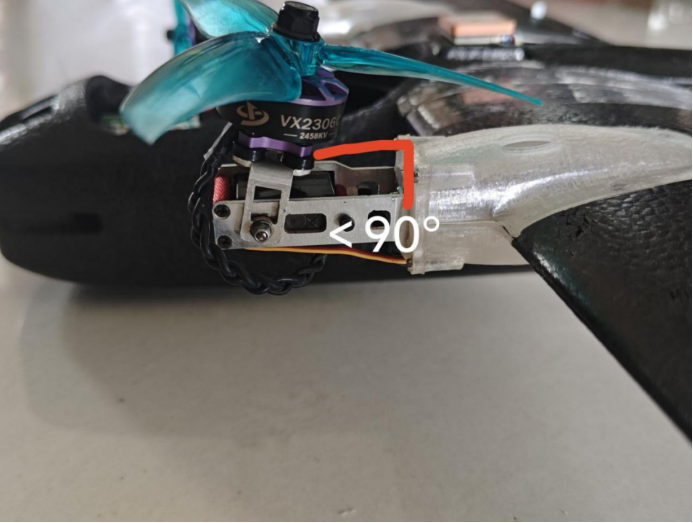
我们可以增加7通道min的值让其垂直,反之当左倾转舵机大于90度时,则需要减小7通min的值
同理,当右倾转舵机出现不垂直时,调整8通的max值即可
当我们处于FBWA模式时,两个倾转舵机是平行180°的,如下图所示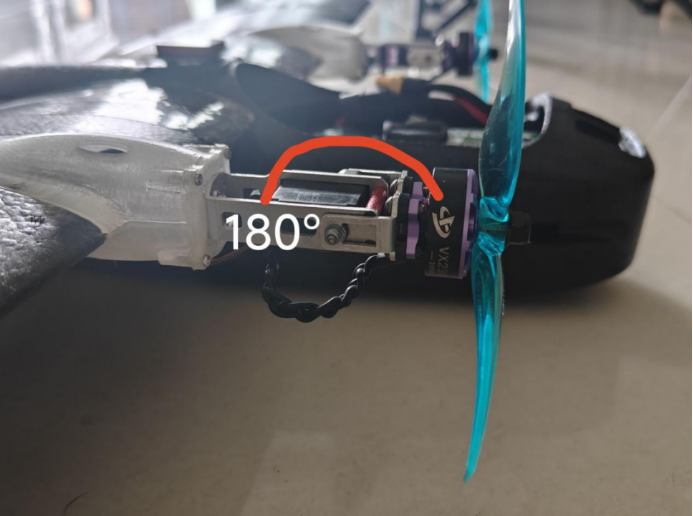
地面站OUTPUT显示如下,我们可以看到在FBWA模式时,左倾转舵机的PWM值是处于高位,右倾转舵机的PWM值处于低位。 与Q_stabilize模式下左右倾转舵机不垂直的调整方法一致,FBWA模式下调整的是7通道左倾转舵机的最大值和8通右倾转舵机的最小值
示例:
左倾转舵机小于180°时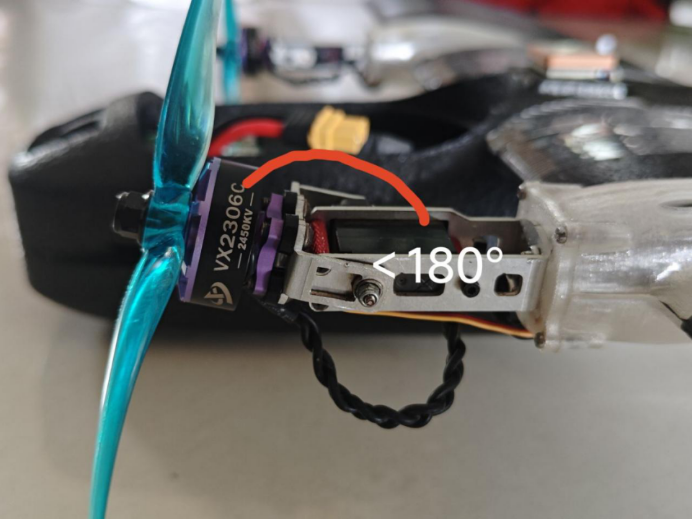
我们需要增加7通道的max值,反之左倾转舵机大于180°时则减小7通道的max值
同理,当右倾转舵机出现不垂直时,调整8通的min值即可
总的来说,我们可以通过调整不同模式下的PWM信号的最大和最小占空比值来精确控制舵机的位置或角度。这可以通过MP地面站的输出界面进行直观的调整和优化。
当我们调整min、max值时,地面站可能会弹出超出限制的提示,点击确认即可。
5.2.2固定翼舵面检查
详细可见AP快速调参指南:
https://doc.aeroeggtech.com/books/aet-h743-basic-ardupilot/page/aet-h743-ardupilot
(1)在遥控上切换到FBWA模式,进行舵面检查,通过打俯仰,升降,方向,检查飞机的舵面反馈是否正确。如出现舵面反向,可在“SERVO OUTPUT”界面找到对应通道勾选REVERSE即可。
(2)进行舵面辅助修正方向检查,我们将飞机任意摆放模拟空中姿态,例如将飞机低头,观察舵面是否会翘起,以此帮助飞机抬头,恢复平飞姿态,以此类推测试滚转,偏航;
(此处检查飞控输出与舵机的输出是否一致,如果还是出现舵面反馈不一致的情况,则需回到 2.1.遥控器校准 中重新检查,以及检查舵机接线是否准确)
5.3电调校准
进入飞行数据界面,找到动作栏,点击解锁。
a.确认遥控器已经校准了,遥控器切到Q_stabilize模式,油门推到最高
b.点击Force Arm,即可强制解锁(注意测试时请勿装桨)
c.此时给飞控上电池供电,电调“滴滴”两声后,油门收到最低
d.电调校准完成,可轻推油门查看电机转向与桨是否匹配。(如不匹配,可任意调转两根错误转向的电机的电调线,将其反向)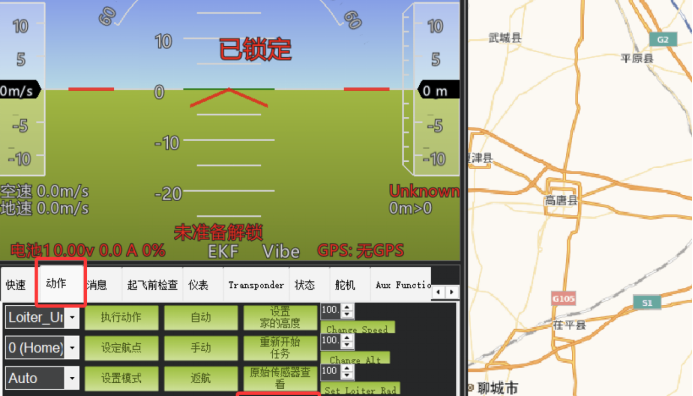
6.垂起部分参数
6.1倾转相关参数
以下参数根据实际使用情况修改
QTILTYAW_ANGLE=10 (多轴用的矢量角度,10=10度) 多轴模式下打方向舵倾转电机转动的最大角度 ,一般来说装桨不刮到机身就行
QTILTFIX_ANGLE=10 (固定翼模式用的矢量角度,10=10度 打开后打副翼和升降都会有倾转舵机参与矢量控制)
QTILTFIX_GAIN=0.6 (固定翼矢量感度,0=关闭,0.6=60%,1=100%)
QTILTMAX=70 (倾转舵机到这个角度等待空速达到=70度)
QTILTRATE_DN=25 (多轴变固定翼倾转舵机向下倾转的 角速度 每秒25°)
QTILTRATE_UP=80 (固定翼变多轴倾转舵机向上倾转的 角速度 每秒80°)
转换参数:
QASSISTANGLE=65 大于这个角度将启动多轴辅助 (属于抗失速保护的一种 飞机角度过大就会自己切成多轴)
QASSISTSPEED=9-10 低于这个速度将启动多轴辅助(设置最小空速+1 T-1一般设置10就行 属于抗失速保护的一种 飞机速度过低就会自己切成多轴)
QTRANSITIONMS =2000 转换为飞机模式后多轴辅助的时间1k=1秒 或飞机切回多轴的等待最大减速时间
QTRANPIT_MAX= 5 转换时运行允许的水平晃动角度 单位度(设置的越小 切倾转就越稳 但是对倾转舵机和电机要求高 T-1是没问题)
QTRANSDECEL= 3 单位 M/s减速率,防止飞机切回多轴速度过高,过高的飞机速度切换到多轴定点模式会让飞机解体
6.2多轴相关参数
以下参数根据实际使用情况修改
QACCELZ =200 垂直加速度 默认250cm/s 小飞机尽量低一些
QVELZMAX=250 最大垂直上升速度(cm/s)
QANGLEMAX =3500 多轴模式最大倾角 默认3000=30度 小飞机可以大一点 不然逆风飞不动
QLOITBRK_DELAY =1 固定翼转倾转后的刹停延迟时间 时间太短会比较吓人 缓冲太长 缓冲距离就长 单位:秒
QMSPIN_MAX=1 多轴最大油门 1=100% 小飞机不费电 大一点好
QMSPIN_MIN=0.15 多轴时的怠速 0.15=15%
QVFWDGAIN=0.05 在多轴QLoiter模式下使用倾转舵机来加速或顶强风 默认0=关闭 打开=0.05
QVFWDALT=2 小于此高度时禁用倾转助推辅助 小于这个高度是不能切固定翼的
QWPSPEED_DN=150 任务期间最大下降高度速率 单位:CM/S
QWPSPEED_UP =200 任务期间最大上升高度速率 单位:CM/S
QMSLEWDNTIME=0 限制油门加速速度 一般是0 动力过猛的话加一些
QMSLEWUPTIME=0 限制油门减速速度 一般是0 动力过猛的话加一些
INITIAL_MODE =17 飞控上电时以Qstab模式启动 防止上电是固定翼模式 地面打桨
6.3垂起返航相关参数
以下参数根据实际使用情况修改
QWPSPEED_DN =150cm/s 一级降落速度 cm/s
QLANDSPEED=50cm/s 二级降落速度 cm/s
QLANDFINAL_ALT=3 二级降落高度 单位M
QRTLALT =100 多轴返航高度 单位M(要看当前高度有无遮挡物)
QRTLMODE=2 启用混合式返航(=2)
ALTHOLDRTL=-1 固定翼返航高度 单位M 如果设置为-1,则保持当前高度返航。如果设置了高度 则会慢慢降高或者爬升至指定高度返航
QRTLMODE注解: 1:飞机在返航点的RTL_RADUS米范围内,RTL将立刻变为QRTL 设置成1会导致如果保持高度返航,飞机即便高度很高 一旦飞到范围内立刻就会切多轴返航(QRTL),过高的高度变成QRTL是非常危险的 多轴降落可能会被风吹跑 电池耗干炸机
2:飞机将遵循参数ALTHOLDRTL 进行返航,并以半径QFWLNDAPRRAD(这个参数值默认是0,如果是0则参照参数: WPLOITERRAD,T-1我们设置的是50M)向下盘旋至QRTLalt,再切QRTL 降落
具体请参阅 “自动VTOL着陆”:https://ardupilot.org/plane/docs/quadplane-auto-mode.html 【如有更多参数设置需求,请自行搜索文献了解】
7.空速管设置
参考此链接:https://doc.aeroeggtech.com/books/03afd/page/fapple
8.垂起测试
8.1多轴反馈逻辑检查
请在飞控自检完成,并显示EKF3 active后,正常解锁,进行测试
8.1.1 Q_stabilize模式遥控器输出检查
(轻推油门保证三个电机都在转动,并轻微打杆给予飞控指令)
推俯仰杆,尾电机转速增加
拉俯仰杆,左前右前电机转速增加
打左滚转,右电机转速增加
打右滚转,左电机转速增加
8.1.2 Q_stabilize模式自稳反馈检查
(轻推油门保证三个电机都在转动,并给予飞机一定姿态变化)
当飞机抬头时,尾电机转速增加,
当飞机低头时,左前右前电机转速增加
当飞机左滚时,左前电机转速增加。
当飞机右滚时,右前电机转速增加
(如出现电机反馈异常,检查电机信号线是否接插正确)
8.2 Q_ AUTOTUNE
当Qstabilize模式下,飞行手感不好时,可以通过QAUTOTUNE模式进行多轴的自动调参
具体请自行搜索相关(文章以刺客T1为例,如为别的飞机需根据实际情况调整飞控参数)
8.4 固定翼测试(重点)
4.输出设置
8.首飞测试及首飞后调试(重点)
9.调参完成
注意事项: 起飞前请先检查重量重心,电池电量;上电后检查模式切换是否正常,旋翼反馈是否正常,搜星是否满足安全飞行需求
在进行垂起切换飞行前,请分开测试完成多轴模式和固定翼模式,当两个模式测试完成后再进行切换测试
当我们开启垂起模式后,上电自检可能会弹出AHRS:not using configured AHRS type报错,此报错为GPS还未完全稳定,等待OSD或者消息提示弹出EKF3 ACTIVE即可正常起飞
10.切换测试
在测试完固定翼和多旋翼都没有问题后,可以测试模式切换,测试时请注意逆风起降。
具体流程如下:
10.1 Q_stabilize模式爬升20m(根据场地安全高度,预留一部分安全高度)
10.2切换至FBWA模式,飞机在向前飞行,如无法保持平衡直线飞行,请根据实际情况选择FBWA或Q_stabilize模式救机,落地后调整相关参数。
10.3具备一定初速度后(可以通过OSD判断)切换至FBWA模式观察飞机是否正常,如出现意外,请根据实际情况选择FBWA或Q_stabilize模式救机,落地后调整相关参数
10.4固定翼返航时预留一定距离,航向保持直线切换Q_stabilize模式,如无法稳定降落,可以考虑固定翼复飞后降落,落地后调整相关参数