第二章:遥控器校准
2.遥控器设置
2.1.遥控器校准
遥控器校准界面需要参考说明书进行详细的接线和设置。 确保遥控器的通道与飞控的通道一致,无反向问题:
进入遥控器校准界面
遥控器打左滚时,ROLL值向左偏移;
遥控器打右滚时,ROLL值向右偏移
油门向上推杆时,THR值增加
油门向下拉杆时,THR值减小
打左偏航时,YAW值向左偏移
打右偏航时,YAW值向右偏移
注意:遥控器的拉杆操作中,俯仰(PITCH)通道与其他通道的逻辑是反向的,当向下拉杆时,PITCH值应往上增加,反之亦然。如有不是,选择是否勾选反转。
请务必保证遥控器打杆以及校准界面输出值与上述文字及图片保持一致
请务必保证遥控器打杆以及校准界面输出值与上述文字及图片保持一致
请务必保证遥控器打杆以及校准界面输出值与上述文字及图片保持一致
(这一步的检查目的是确保遥控器输出与飞控输出一致,否则飞控逻辑有可能混乱)
对于使用Futaba、天地飞等遥控器的用户,如遇到遥控器通道油门反向等情况,同上处理。
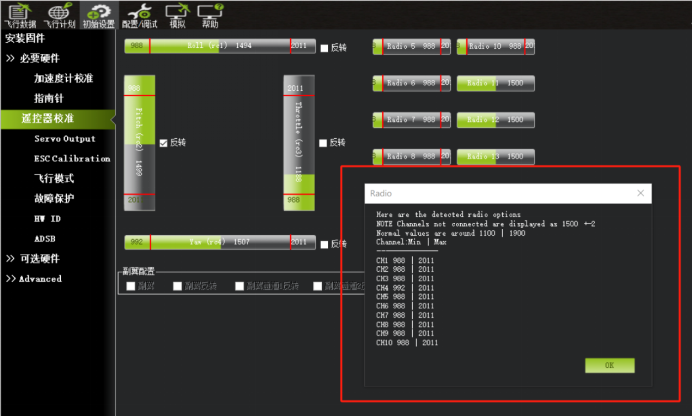
点击校准遥控时,请确保将所有通道的遥杆和开关推至最大位置,以显示通道输出的最大和最小值。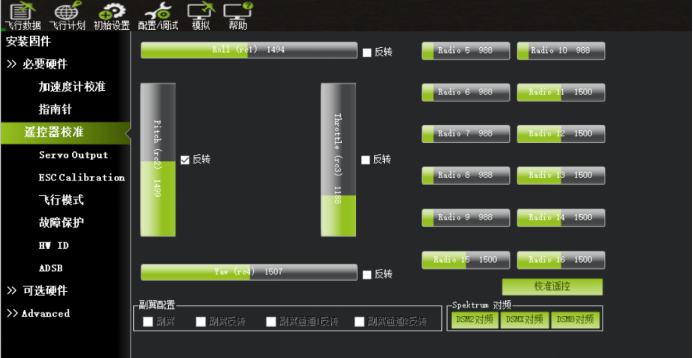
校准完毕后点击“完成时点击”
弹出此界面即可完成遥控器校准。