全部参数表
其他参数更多是在“全部参数表”里面进行针对性设置,这是ardupilot固件最具有特点的地方。
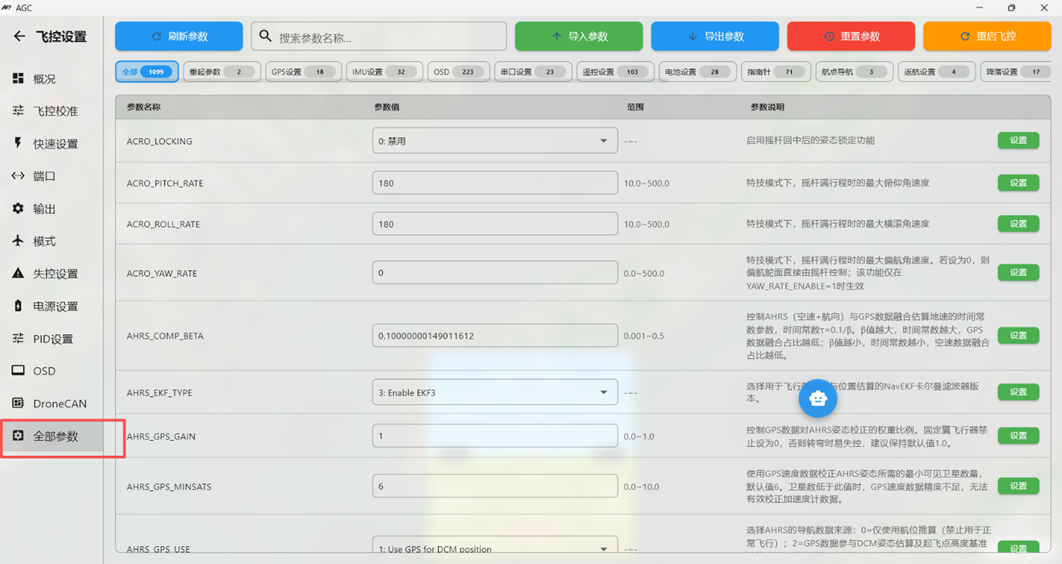
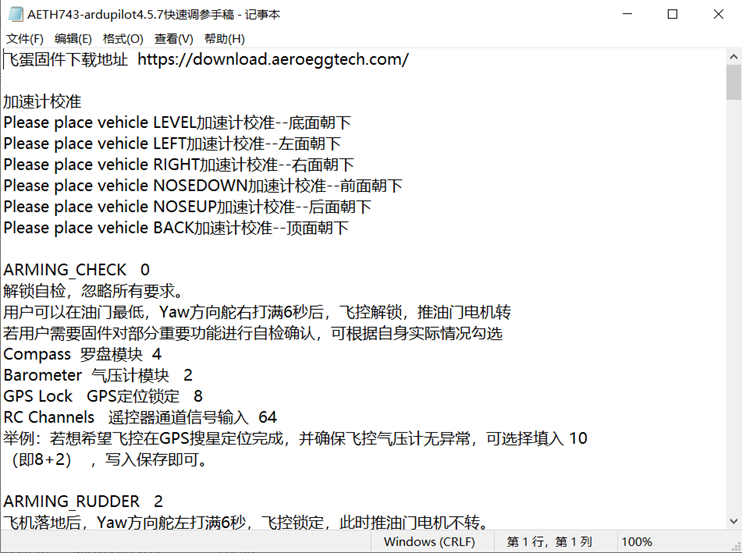
使用全部参数表,建议在电脑同步打开调参手稿TXT文件。
6.1. 启用安全开关
Brd_Safety_Deflt
启用安全开关,一般修改成0(不使用)。注:安全开关并不是解锁。
6.2. 自检及解锁
Ardupilot固件对飞控解锁要求非常高,默认参数需要自检数十项参数后达标才允许解锁,非常麻烦。(搜索ARMING)
设置设备必须品清单。如要出门野营,清单上写着:需要帐篷、需要手电筒、需要地图 。 ARMING_REQUIRE 默认1,修改成45。1 (遥控器) + 4 (罗盘) + 8 (GPS数值) + 32 (空速) =45 设置成0禁用自检,忽略所有要求,一般在调试时使用。 Barometer气压计、Compass罗盘、GPS Lock有效3D定位、RC Channels通道、Board voltage电压、Battery level电池电量、Airspeed空速计、Logging Available日志可用、Hardware safety switch硬件安全开关、GPS Configuration精准定位信息
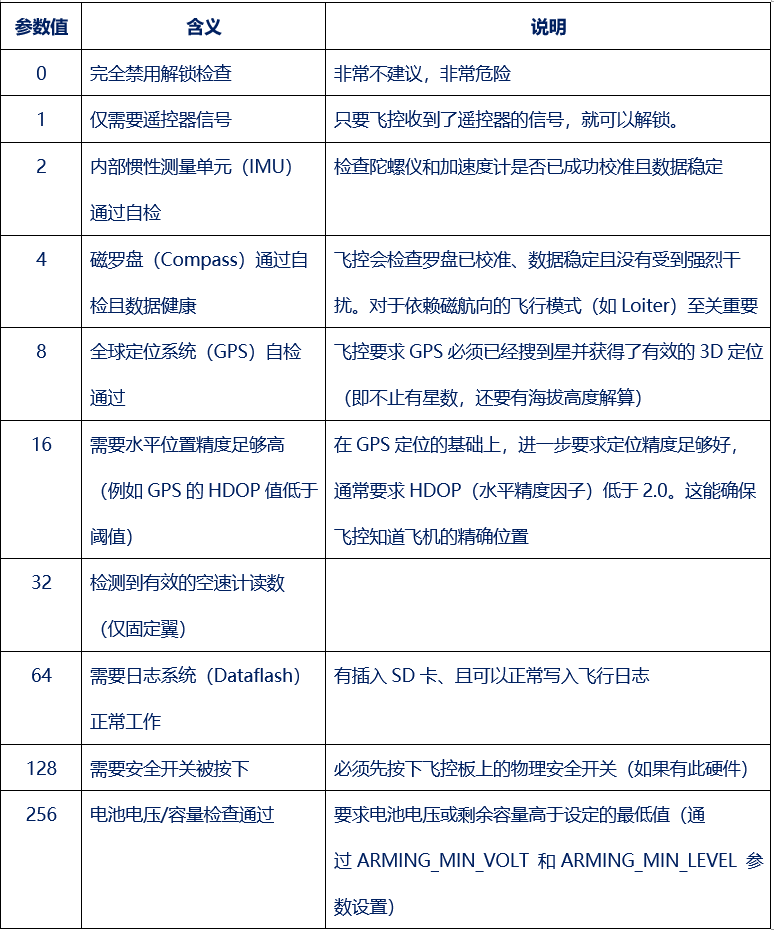 设备质检标准。如对于ARMING_REQUIRE清单上的每一项,我们要检查:帐篷破没破?手电筒亮不亮?地图是不是最新的。
设备质检标准。如对于ARMING_REQUIRE清单上的每一项,我们要检查:帐篷破没破?手电筒亮不亮?地图是不是最新的。
ARMING_CHECK 默认值1(所有设置的设备清单项地行检查),设置成0 (关闭即可,非常危险,一般用于调试)。配合ARMING_REQUIRE使用(需要什么),ARMING_CHECK(确定检查什么内容)。
 若用户需要固件对部分重要功能进行自检确认,可根据自身实际情况勾选。
若用户需要固件对部分重要功能进行自检确认,可根据自身实际情况勾选。
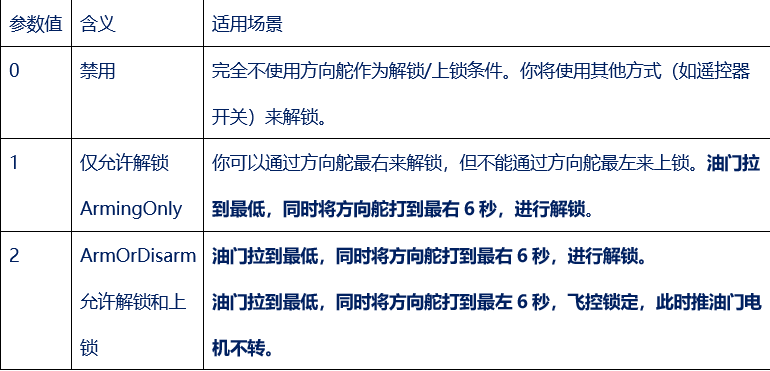
ARMING_RUDDER默认值1,修改成3。
安全开关参数,是否允许以及如何通过将方向舵打到特定位置来配合解锁或上锁。
6.3. 开启垂直起降模式
Q_Enable
此参数控制是否启用垂直起降,默认参数为0,修改成1。点击“写入参数”,弹出提示,点OK,如下图。断开电源及USB数据线,重新后,再连接MP即可。
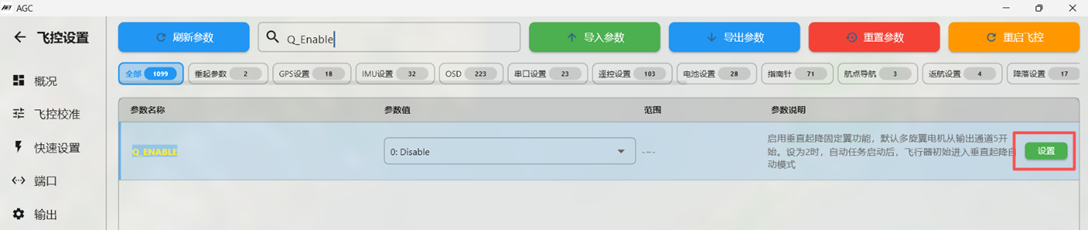
点设置就行。
Q_M_Spin_Arm
解锁后怠速,默认0.1,可根据自己需要修改成0(不转)。
Q_Land_Final_Alt
多旋翼降落,下降至设置值,进入第二阶段降落,默认6米,修改成8米。
Q_Land_Final_spd
多旋翼降落,进入第二阶段降落的速度。默认0.5m/s,修改成0.4m/s
Q_Trans_Decel
固定翼状态切换成多旋翼状态的减速率,默认2m/s,修改成3m/s。
Q_Transition_MS
从多旋翼状态切换成固定翼状态后,多久才停止垂起电机(即延时),默认5000ms,修改成6000ms(即6秒)
Q_M_Hover_Learn
默认为2,多旋翼状态下油门自动学习
6.4. 确定机型
Q_Frame_Class
此参数控制垂直起降的旋翼类型,默认参数为1( 4+1的垂直起降是4轴,即Quad),点击“写入参数”。 备注:自由者Y3需要修改成7(即Y型)。
6.5. 垂直起降的旋翼类型
Q_Frame_Type
默认1即可。备注:
VTOL(垂直起降固定翼)无人机常将此参数设置为1;
4+1的垂直起降是4轴X型(即1);
6.6. 倾转控制
Q_Tilt_Enable
4+1(适用于泰坦眼镜蛇等)或4+2时,不需要倾转,需要修改成0。
此参数控制垂直起降的倾转矢量控制,默认参数为0(关闭),修改成1(即启用,适用于自由者Y3、4转2机型等)。点击“写入参数”,会弹出重启提示,断开电源及USB数据线,然后重连。
备注:4+1垂起,需要将参数修改成0(关闭)。
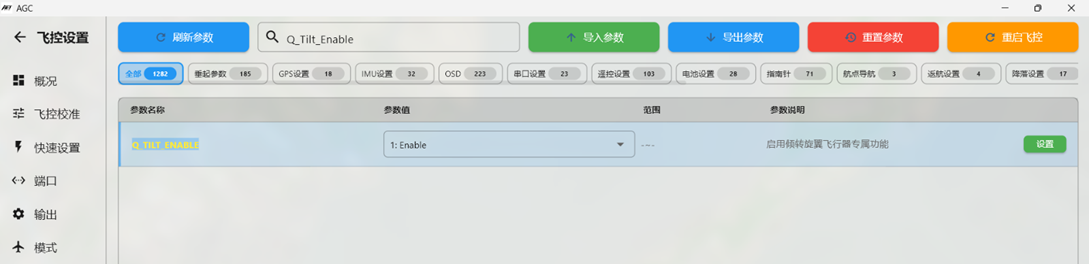
后续Q_Tilt_xxx参数,Q_Tilt_Enable修改成1启用,并USB重新连接才生效。
Q_Tilt_Type
此参数控制垂直起降的倾转矢量控制类型,默认参数为0,修改成2(矢量偏航,通过控制电机的推力方向来实现机身的偏航控制),点击“写入参数”。
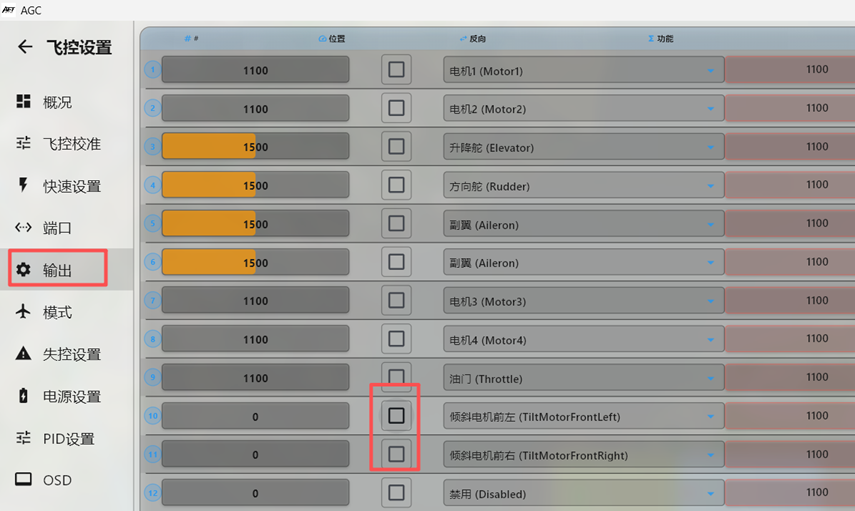
Q_Tilt_Mask
此参数标记矢量控制倾转舵机,点击该参数右侧的“Set Bitmask”按钮,选择“Moter1、Moter3”电机Servo Output,点击“写入参数”。
Q_Tilt_Yaw_Angle
此参数为旋翼YAW轴(航向)控制角度,默认值为0,修改成10,点击“写入参数”。
Q_Tilt_Fix_Angle
此参数为固定翼横滚俯仰矢量辅助角度,默认值为0,修改成10,点击“写入参数”。
Q_Tilt_Fix_Gain
此参数为矢量灵敏度,默认值为0,修改成0.5,点击“写入参数”。
Q_Tilt_Rate_DN
此参数为切换固定翼角速度,默认值为0,修改成25(即25度/秒),点击“写入参数”。
Q_Tilt_Rate_UP
此参数为倾转舵机切换多旋翼角速度,默认值为40,修改成80(即80度/秒),点击“写入参数”。
Q_Tilt_Max
此参数为倾转舵机切换至固定翼时,初始角度。默认45,修改成65。
6.7. 防失控保护
Q_Assist_Angle
此参数为姿态变化大于35度时,将启用多旋翼垂起辅助(即切换成旋翼模式),默认值为30,修改成60(即60度),点击“写入参数”。
Q_Assist_Speed
此参数为速度低于设置值速度时,将启用多旋翼垂起辅助(即切换成旋翼模式),默认值为0,修改成10m/s。防止失速,而炸机。
Q_Assist_Alt
此参数为最低高度保护,低于此高度将启用多旋翼垂起辅助(即切换成旋翼模式),修改成20(米)。一般从固定翼转成垂起时,会掉高15-20米。
Q_Angle_Max
多轴倾斜角度,与外部力进行抗衡(如风吹)等。默认3000,修改成4500(即45度角)。
6.8. 多旋翼QLoiter或Loiter模式下启用倾转舵机用于加速或抗风
Q_VFWD_Gain
此参数为多轴Loiter模式下启用倾转舵机用于加速或抗风,默认值为0,修改成0.05,点击“写入参数”。
6.9. 低于高度禁止切换固定翼 Q_VFWD_Alt
倾转电机在高于此高度时才进行助推,避免桨叶打到地面。默认值为0,修改成2,点击“写入参数”。
6.10. 设置上电时默认旋翼模式
Initial_Mode
此参数上电时默认飞行模式,默认值为0,修改成17(多旋翼自稳QStabilize),点击“写入参数”。
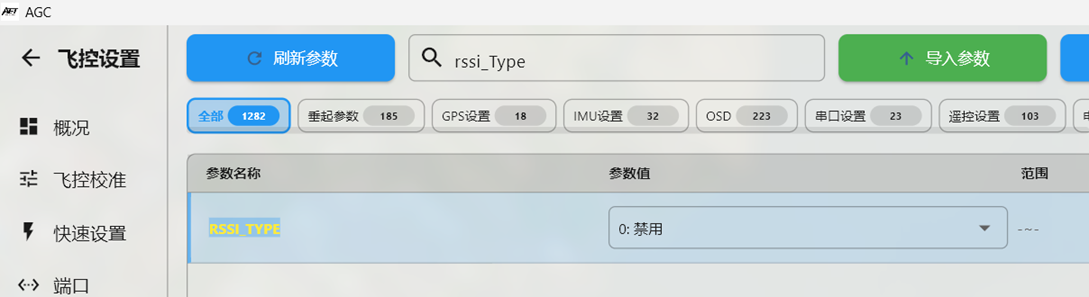
rssi飞控接收到的信号强度参数
rssi_Type修改成2
P、I、D参数
全部以美国手为标准,Y3机型时设置。
偏航轴P、I、D值(遥控器左手摇杆,左右)
Q_A_Rat_YAW_P 默认0.18,修改成0.2
Q_A_Rat_YAW_I 默认0.018
Q_A_Rat_YAW_D 默认0,修改成0.02
俯仰轴P、I、D值(遥控器右手摇杆,上下)
Q_A_Rat_PIT_P 默认0.25,修改成0.1
Q_A_Rat_PIT_I 默认0.25
Q_A_Rat_PIT_D 默认0.0036,修改成0.004
横滚轴P、I、D值(美国手遥控器右手摇杆,左右)
Q_A_Rat_RLL_P 默认0.25,修改成0.1
Q_A_Rat_RLL_I 默认0.25
Q_A_Rat_RLL_D 默认0.0036,修改成0.004
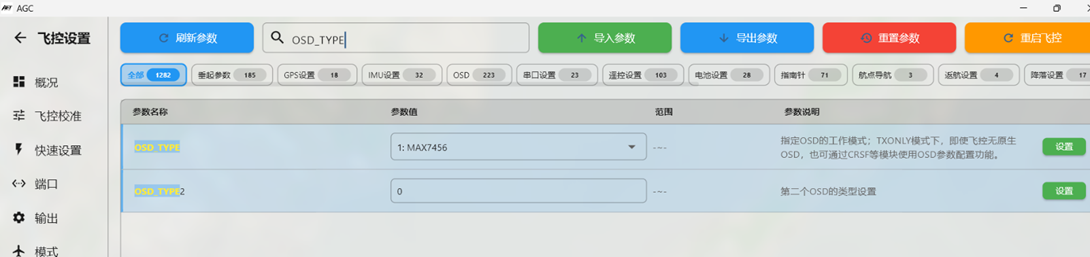
OSD_TYPE
此参数主要适应图传的OSD显示模式,
常见的模拟5.8G图传,该参数保持默认1即可
使用MSP_Displayport模式的数字图传(大疆G2/G3/N3眼镜适配的天空端、蜗牛Avatar系列天空端、开源OpenIPC数字高清天空端),该参数设置为 5
使用老款大疆高清眼镜V1/V2对应Vista及原厂双天线天空端,该参数设置为 3
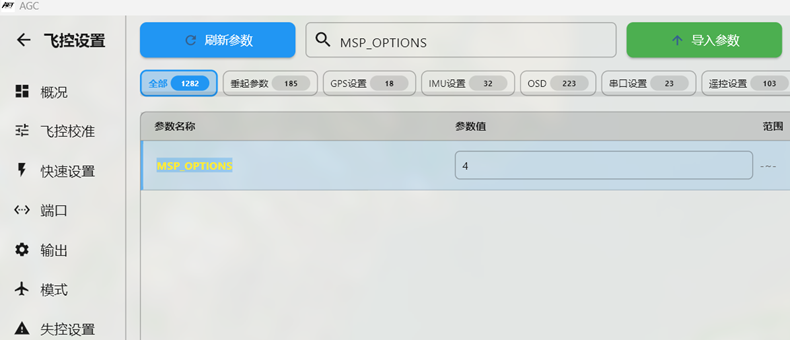
MSP_OPTIONS 4
使用大疆G2/G3/N3眼镜适配的天空端,需要设置该参数
OSD_OPTION 32
使用大疆G2/G3/N3眼镜适配的天空端,需要设置该参数。
使用Openipc开源数字天空端,该参数为 42

OSD1_TXT_RES 1
此参数主要为调整OSD显示的分辨率布局,高清图传均建议设置
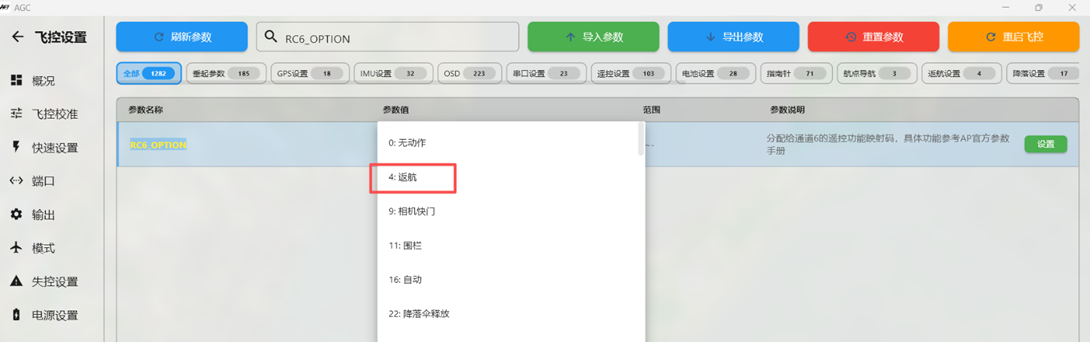
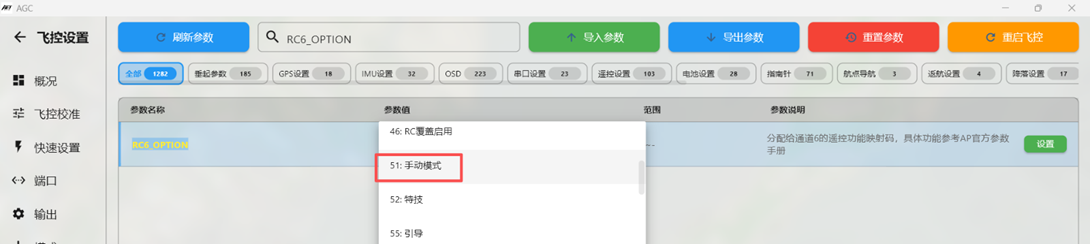
飞行模式的切换通道FLTMODE_CH 固件默认8通道作为飞控模式切换通道,只需要在遥控设置8通道为6段开关用于模式切换。使用ELRS接收机,请使用ELRS3.X及以上固件版本,100hzFull模式或者333HzFull模式 ,该参数可保留默认8 ,即使用8通道作为模式切换) 如需要修改使用其他通道作为6段模式切换通道,例如使用12通道作为模式切换,在Mission Planner调参软件,全部参数,将FLTMODE_CH修改成12,将12通道作为模式切换通道 思翼MK15遥控器,使用SA三段开关切换飞行模式(6通道,右肩三段开关)。在Mission Planner调参软件,全部参数,将FLTMODE_CH修改成6。
FBWA模式下最大允许姿态角度值
ROLL_LIMIT_DEG 60 FBWA模式下横滚最大比例角度 默认45 。建议修改至60,修改此项,降低FBWA模式下横滚转弯的半径
PTCH_LIM_MAX_DEG 35 FBWA模式下俯仰最大比例角度
默认20 建议修改至35,修改此项,降低FBWA模式下爬升倾角,提高爬升速率
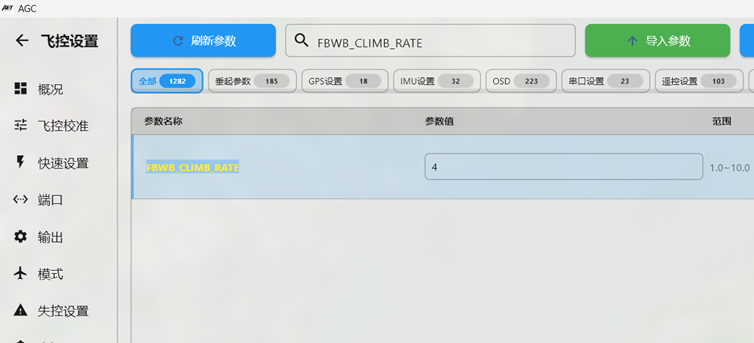
FBWB_CLIMB_RATE 4 (510m/s都可以) CRUISE 定高定向模式是远航常用的飞行模式,默认参数中允许玩家爬升的速率比较低,仅2M/s,玩家可根据飞机动力搭配的特点,适当修改此参数。在执行定高定向模式时,遥控输出俯仰拉升动作,飞机能根据设定的爬升速率进行快速爬升。推荐510m/s。参数如下
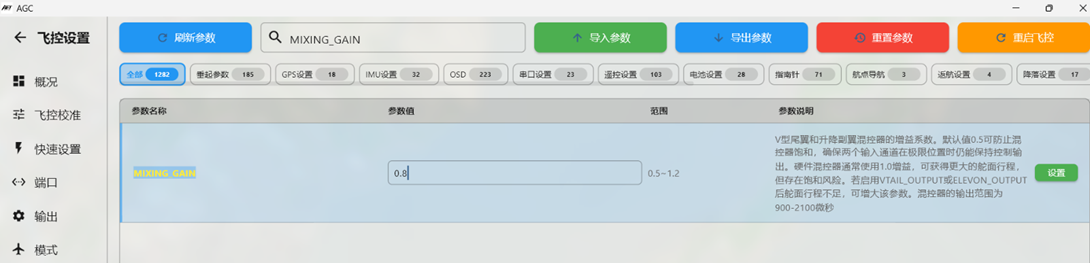
混控机型的舵面允许角度
安装飞翼机型(使用副翼升降混控)、V尾机型(使用升降方向混控)。飞控默认参数允许的舵面动作比较小。可以通过修改MIXING_GAIN参数的值增大舵面动作量。默认0.5。可以适当调整为0.8或 1。




固定翼自动调参
AUTOTUNE_LEVEL 自动调参等级,默认6即可
AUTOTUNE_AXES 自动调参选项,一般勾选Roll横滚、Pitch俯仰
垂起调参
Q_AUTOTUNE_AGGR 自动调参的敏感度,默认0.1,修改成0.09
Q_AUTOTUNE_AXES 自动调参类型。有Roll横滚、Pitch俯仰、Yaw方向,一次只调一个,不要同时调。
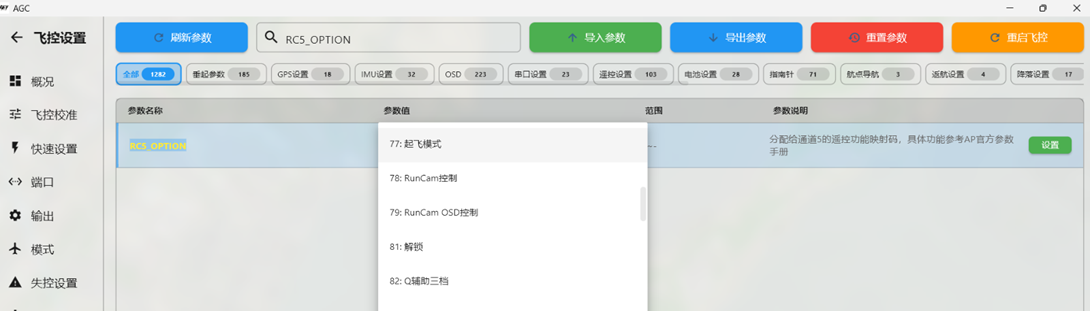
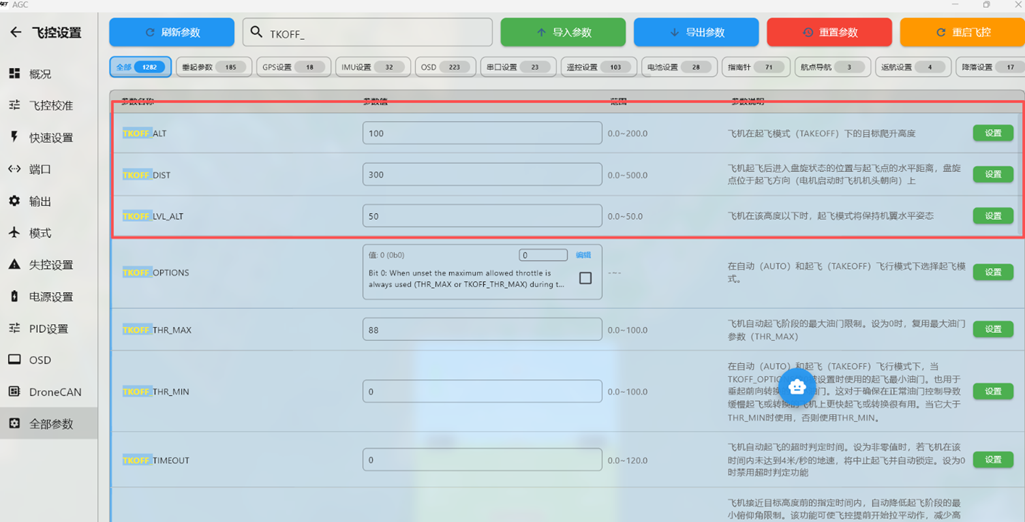
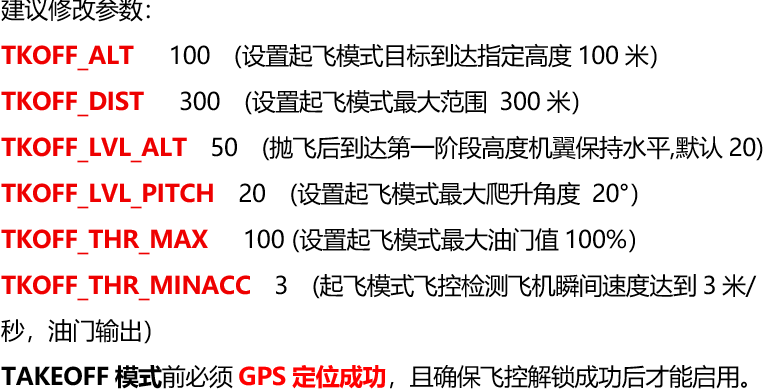
TAKEOFF抛飞模式参数
TAKEOFF抛飞模式是FPV手抛试载机非常实用的起飞模式。在设定对应的模式开关切入后,我们可以针对性的修改抛飞模式中的一些参数。

全部参数,或者失控设置


飞控安装朝向修改 AHRS_ORIENTATION
部分玩家根据自己的载机机舱布局情况,无法使用默认水平安装飞控。特别是一些象真机改FPV载机,机型本身未预留飞控安装位置,需要将飞控粘贴在机舱侧面(侧置安装)或者黏贴在机舱底部(倒置安装)。我们需要通过调整AHRS_ORIENTATION的值来修改飞控的安装角度
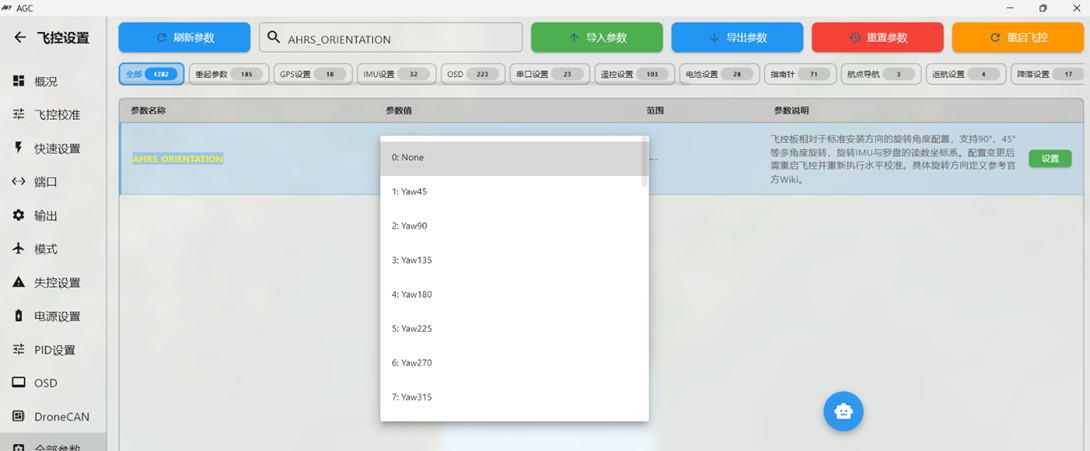
举例1:飞控的主电源出线方向(默认机头方向)朝后,即飞控前后反向安装,则该参数值修改为4。(YAW 180)
举例2:飞控底部黏贴在机舱侧面,即飞控相当于ROLL轴翻转90度或270度,则该参数值为 16 或 20 。
举例3:剑鱼载机,需要倒置安装飞控且原飞控默认机头方向朝后,则为ROLL180 加上YAW180,在参数中并无对应选项,实际观察可以使用PITCH 180也能实现此安装调整。 则该参数值为12