2.4. 第4节 舵机及电调设置
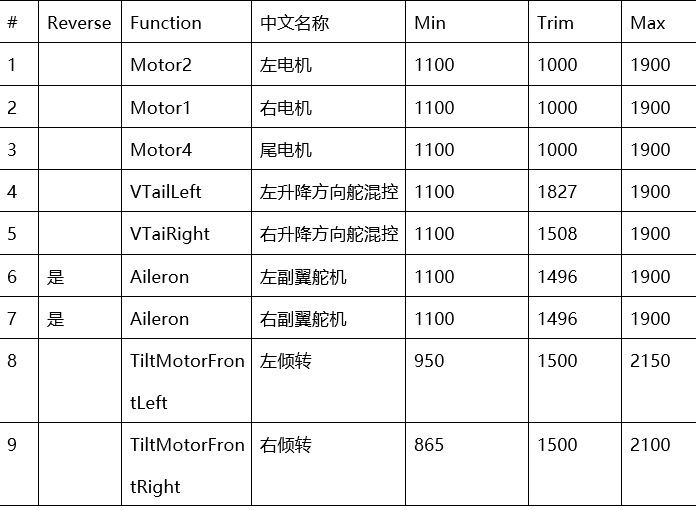
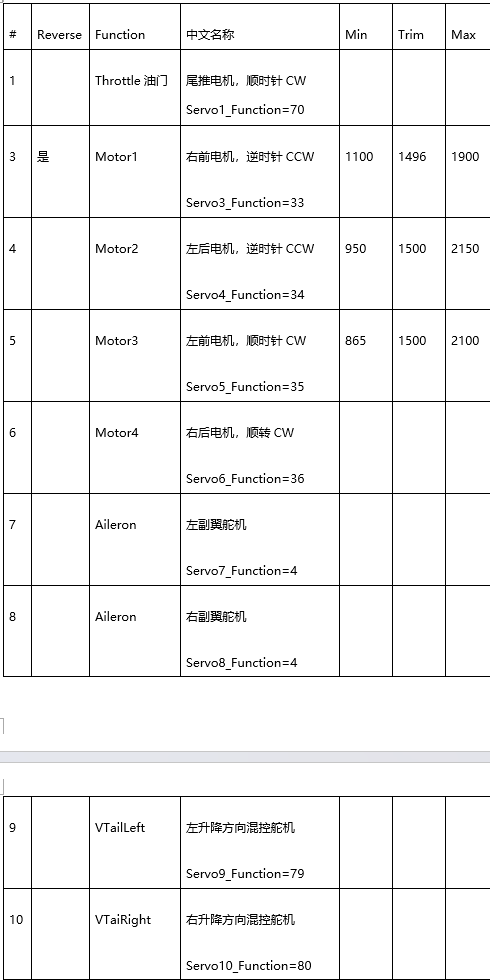
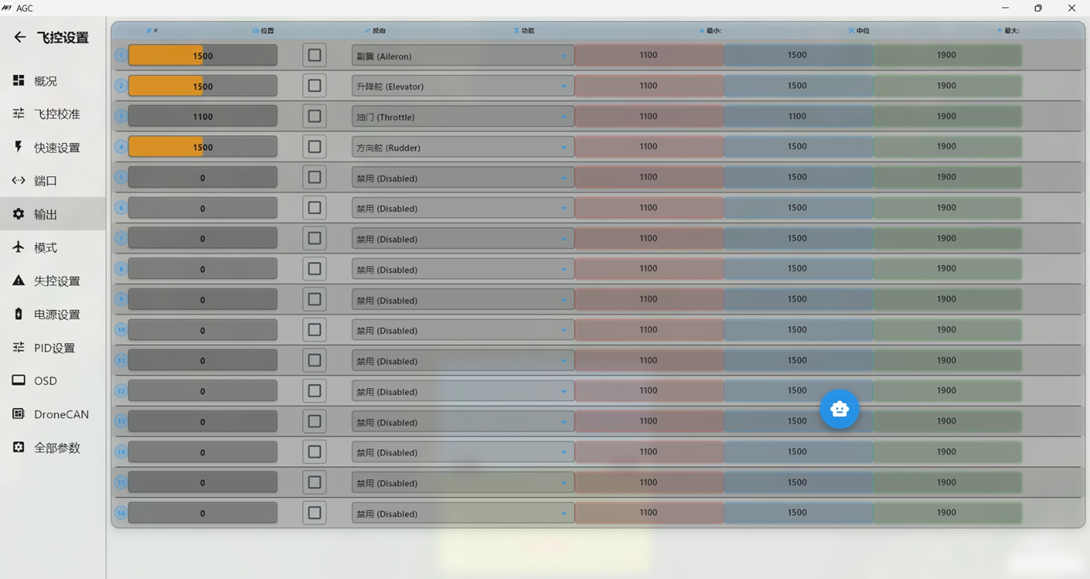 Ardupilot固件对飞控的S1~S12的输出支持完全自定义。上图对应的#1即为飞控的S1,#2即为飞控的S2,以此类推。
Ardupilot固件对飞控的S1~S12的输出支持完全自定义。上图对应的#1即为飞控的S1,#2即为飞控的S2,以此类推。
 每个输出通道都可以在对应的下拉菜单中选择定义,这是Ardupilot固件最有特点的地方之
每个输出通道都可以在对应的下拉菜单中选择定义,这是Ardupilot固件最有特点的地方之
修改输出的自定义设置,需要重启飞控才能生效
2.4.1. DSHot电调(AM32) DSHot电调区分有/无EBC输出,协议支持:Dshot300、Dshot600、PWM。 DSHot电调信号线一般接s、v、g,需要EBC输出时才需要接v,否则只需要接s、g。 “全部参数表”中设置:
1、SERVO_BLH_AUTO修改成1;
2、SERVO_BLH_MASK,指定哪些输出通道(如油门通道)启用Dshot协议。点击Bitmask选择,本示例选择“通道1”。注意:Timer时针组(12通道;36通道;7-10通道;11~12通道,共4个组)。比如选择6通道,则同Timer时针组的3、4、5、6通道都会启用Dshot协议。
3、SERVO_BLH_OTYPE,修改成5(代表Dshot300)
4、SERVO_DSHOT_ESC,修改成1(代表BLHeLi32/kiss/AM32),建议先咨询AM32电调商家。
5、在Mission Planner的“飞行数据” (Flight Data) 界面查看“消息” (Messages) 选项卡,输出显示DS300:1-2,PWM:3-12(DS300:1-2表示1~2号通道使用DS300协议)。
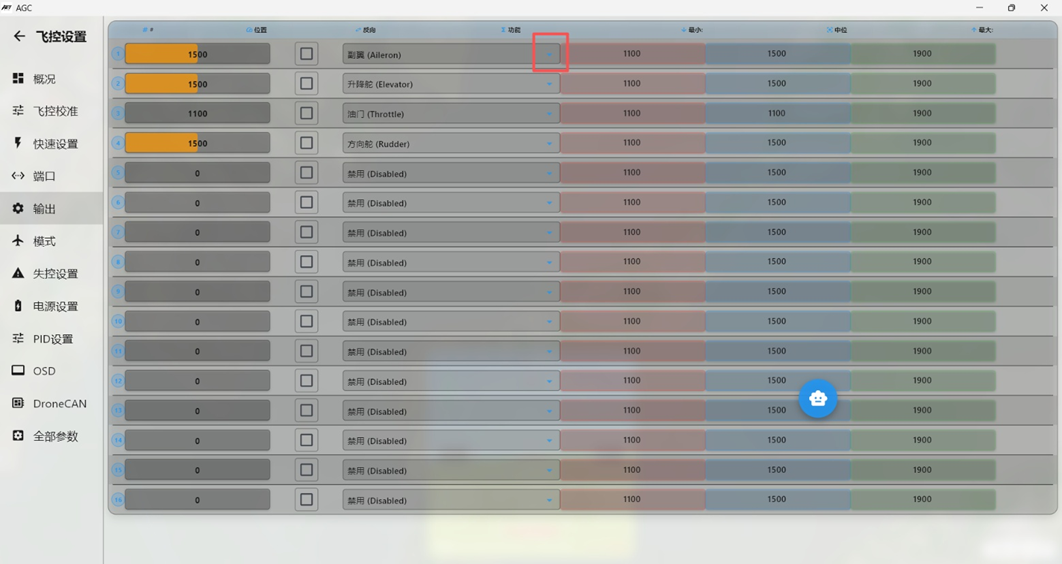
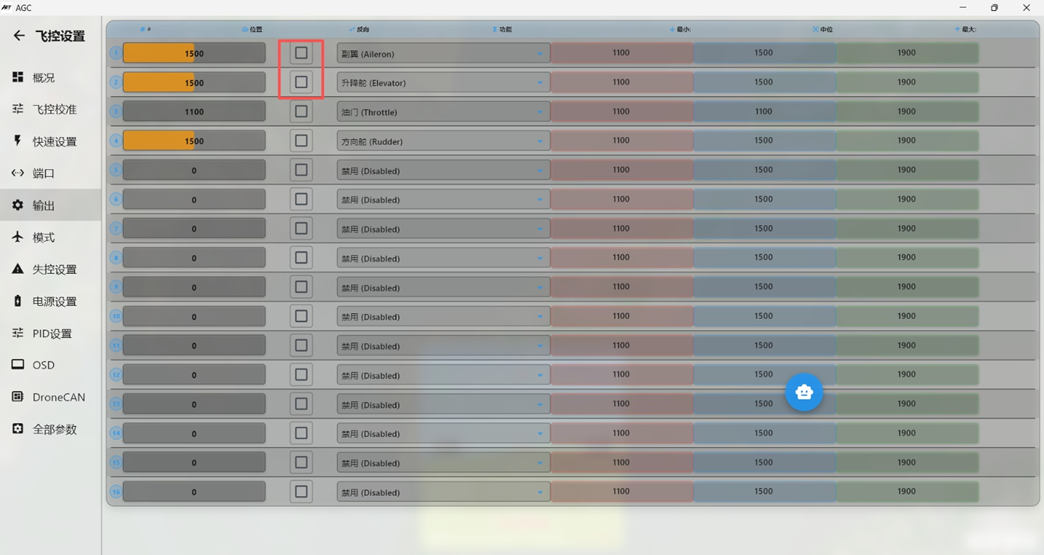
2.4.2. 反向设置
AGC的通道输出为实时输出,后期进行通道辅助修正调整,发现飞控执行飞机姿态修正的时,通道输出方向错误,在对应通道的"反向"处勾选,对应通道的输出即可反向。
2.4.3. 举例1:单发尾推
举例1:用户装一台单发尾推飞翼(ARWING,自由者等),选择S3接飞翼左舵机,,在装机调试过程中发现该舵机输出方向反,则勾选#3的反向使该舵机输出动作反向。选择S1接电调信号线,(电调油门信号)。
2.4.4. 举例2:双发垂尾,电机差动控制
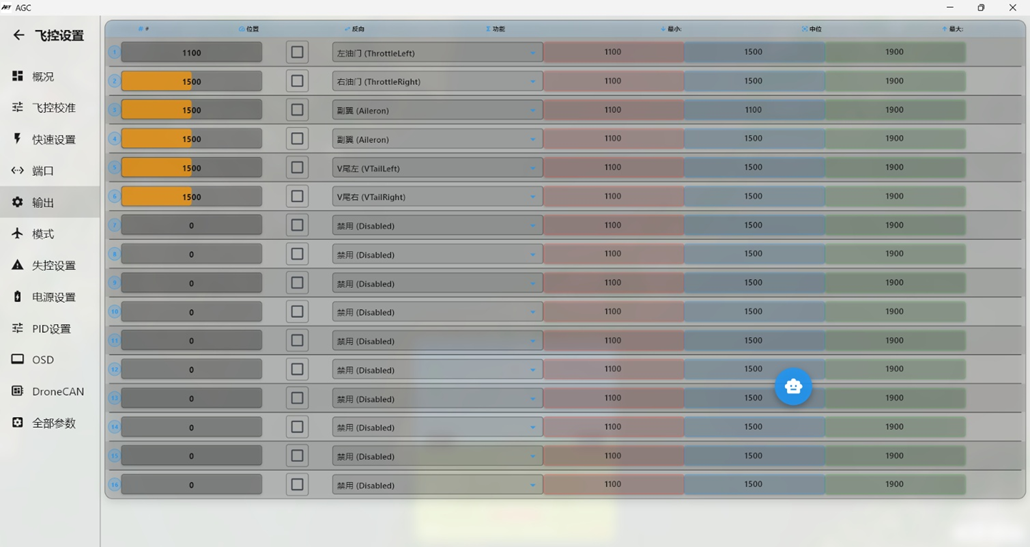
2:使用双电机差动控制
2.4.5. 举例4:自由者Y3或大黄蜂Y3垂直起降固定翼 举例4:用户装一台自由者Y3垂直起降固定翼(Y3垂起),垂直起降时三电机旋翼,巡航时双电机倾转,尾电机停止。

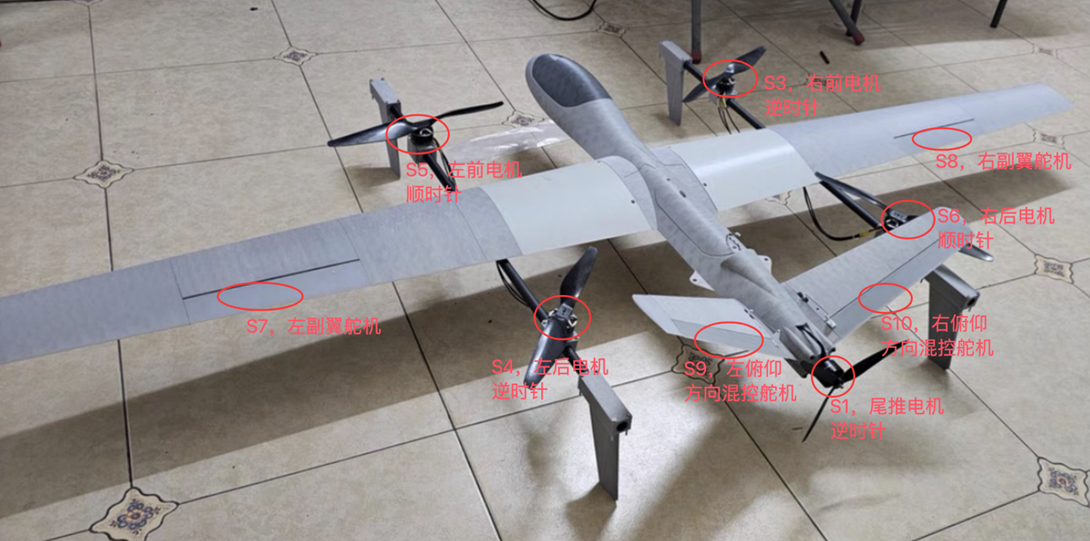
2.4.6. 举例5:4+1泰坦眼镜蛇或复仇者
泰坦眼镜蛇、泰坦复仇者和精翼大红翁都是4+1模式的垂直起降固定翼飞机。

上图,泰坦眼镜蛇
 上图,泰坦复仇者
上图,泰坦复仇者
 精翼大红翁
精翼大红翁
以下以泰坦复仇者为例,设置通道(先在飞控设置Servo,后将舵机通电,否则容易烧毁舵机):
 注意:尾推电机的电调如使用AM32电调,则注意Timer时针组(详情点击跳转)。本示例选择Servo通道1为DSHot协议(根据Timer时针分组,通道2也为DSHot协议),其他通道默认为PWM协议。
注意:尾推电机的电调如使用AM32电调,则注意Timer时针组(详情点击跳转)。本示例选择Servo通道1为DSHot协议(根据Timer时针分组,通道2也为DSHot协议),其他通道默认为PWM协议。
2.4.7. 举例6:4转2信天翁转垂起
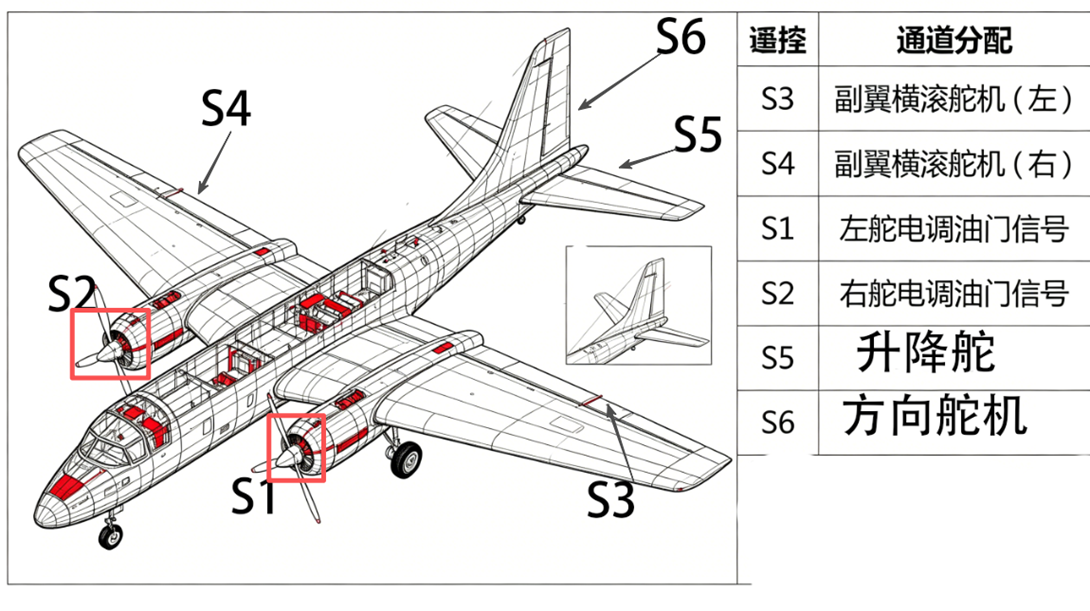
信天翁是双发垂直尾翼的标准固定翼飞机,改垂直起降固定翼后,共4个电机,前2个电机通过舵机设置倾转,没有尾推电机。 Servo1:左副翼
Servo2:右副翼
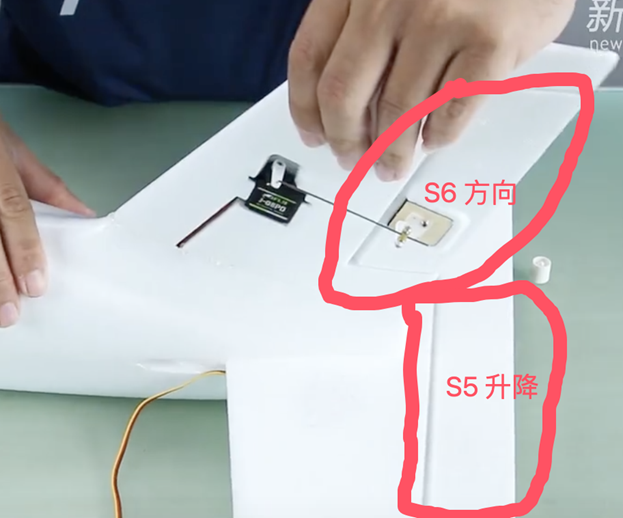
Servo3:左升降方向混控舵机
Servo4:右升降方向混控舵机
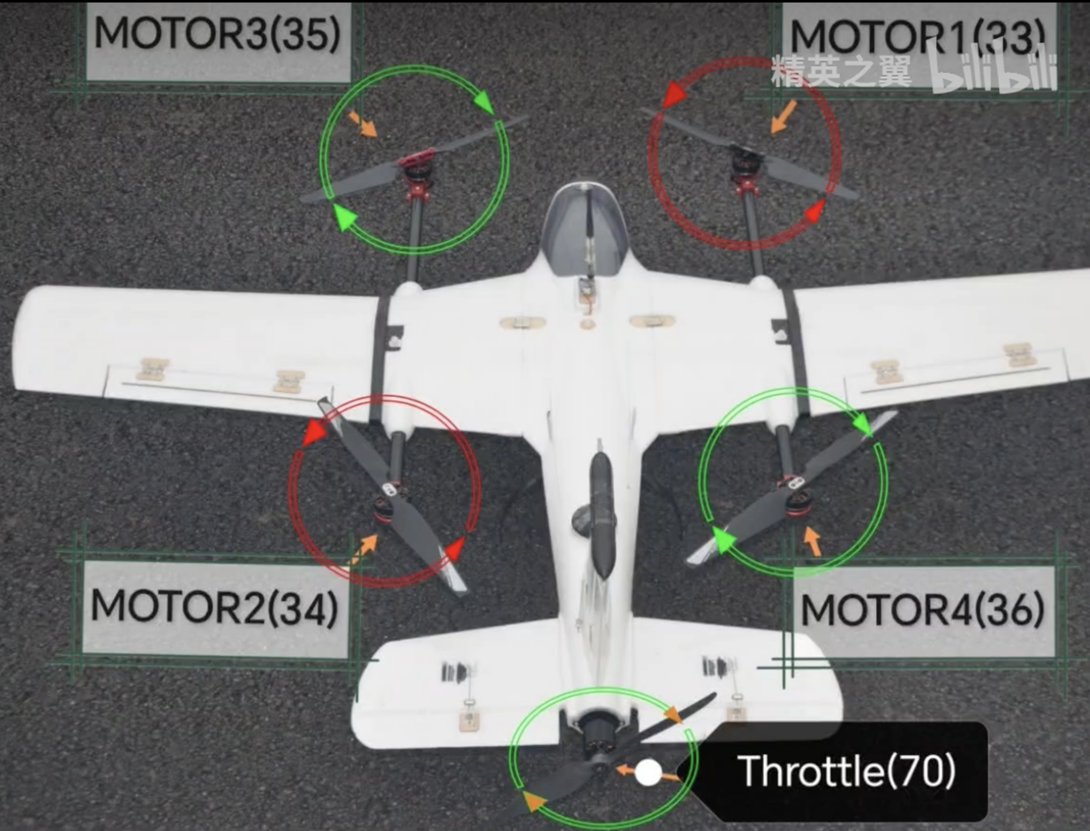
Servo5:右前电调,反转
Servo6:左后电调,反转
Servo7:左前电调,顺转
Servo8:右后电调,顺转
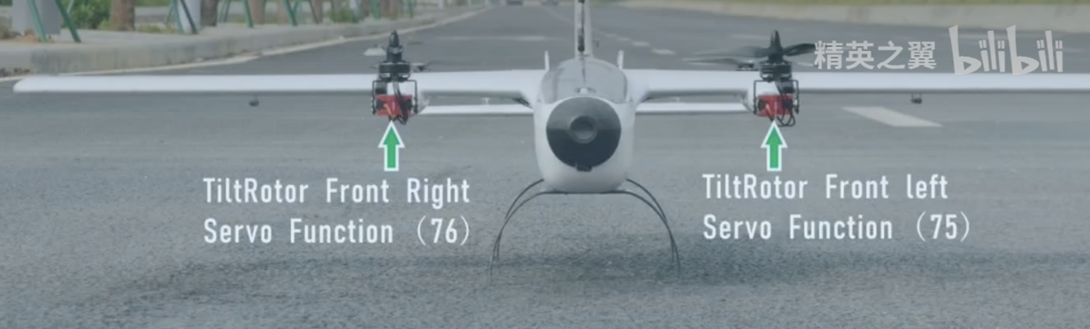
Servo9_Function 设置成75(左前倾转舵机TiltMotorFrontLeft,从机尾往机头方向看)
Servo10_Function 设置成76(右前倾转舵机TiltMotorFrontRight,从机尾往机头方向看)
倾转角度,通过调整Servo9_Min、Servo9_Max、Servo10_Min、Servo10_Max的值。
2.4.8. 举例4:舵机控制云台
举例4:用户想在飞控的S8接一个舵机云台控制FPV摄像头的观察方向,使用遥控器的自定义旋钮开关的10通道来控制这个云台舵机,则可以把#8设置为RCIN10。
2.5. 第5节端口
用户需要对连接飞控的串行总线接口外设进行定义。
第一列Port Name指的是对应串口的名字, 例如SERIAL PORT2指的就是串口2(即UART2)。串口列为对应接口设置的波特率值。
Protcol列为对应接口的定义类型。我们根据不同的串口外设设置不一样的Speed值及Protcol类型
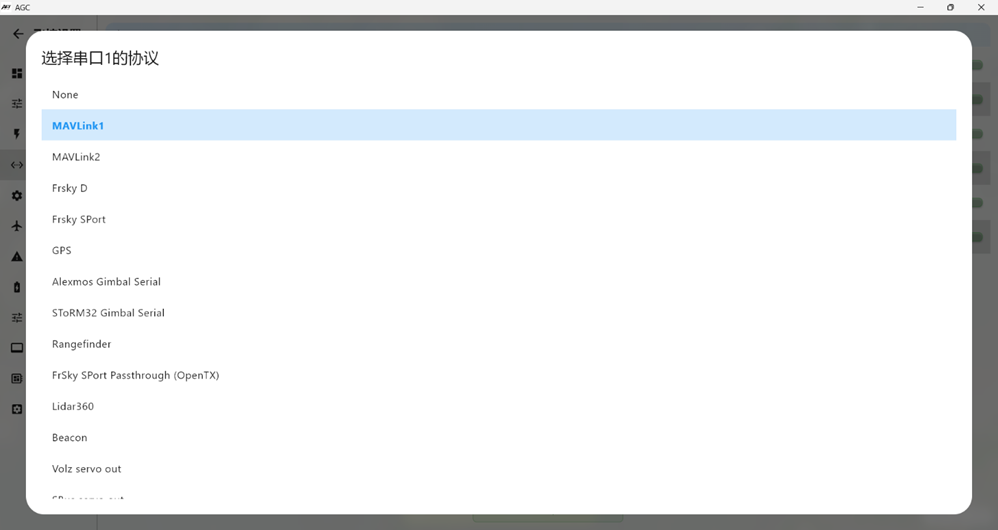
2.5.1. 接收机(电台)设置
如果使用SBUS接收机(例如天地飞wbus,乐迪系列,Futaba系列接收机等),直接使用2.54杜邦3P头接到飞控SERIAL PORT6(即UART6)的RX6-4V5-GND。设置波特率为57600、协议为RCIN,就直接自动识别SBUS接收机信号。
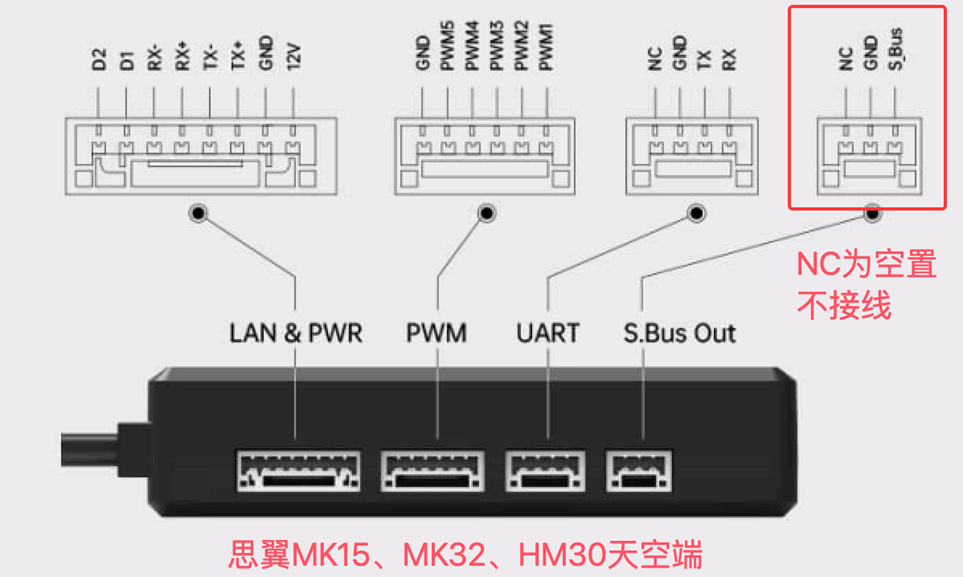
如果使用思翼数图遥一体模块,用GH1.25-3Pin转2.54杜邦3Pin信号线,飞控端接到SERIAL PORT6(即UART6)的RX6-GND;思翼天空端接到S.Bus Out接口(NC线剪断不连飞控),MP调参软件中设置波特率为115200、协议为RCIN。(同时思翼MK15遥控器,思翼遥控APP--数传设置,串口波特率设置为115200,飞控为自定义,连接为UDP或串口)。
 如果使用ELRS/CRSF接收机,接收机需要使用2.54杜邦 4P接口
接入飞控TX6-RX6-4V5-GND ,SERIAL PORT6(即UART6接口),(接线图跳转)。
此类接收机的Speed波特率为115200,协议为RCIN。
注:飞控固件已经不支持PPM信号接收机,以及PWM信号接收机。
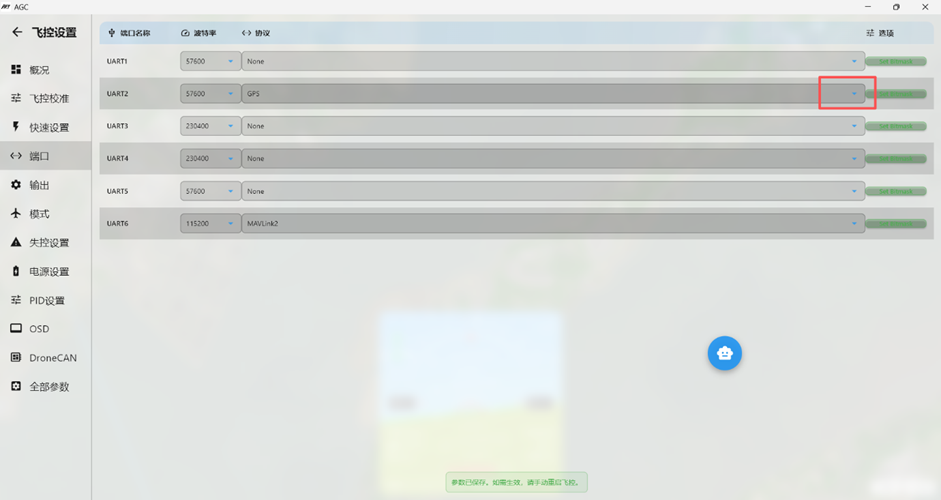
2.5.2. GPS模块设置
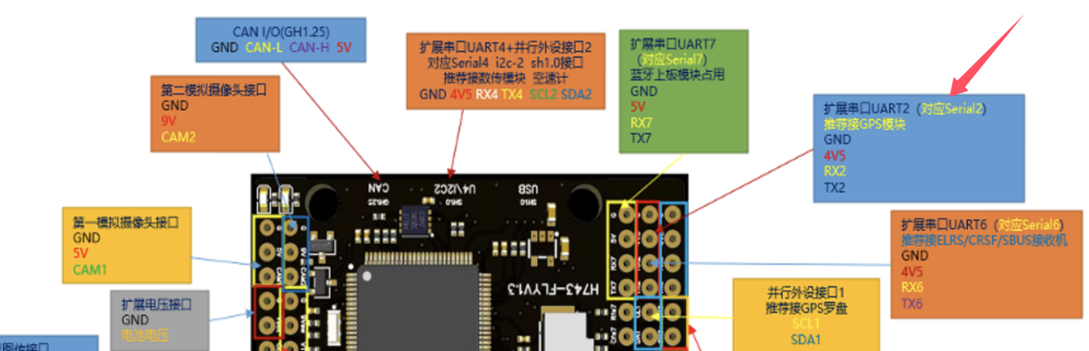
GPS需要使用2.54杜邦 4P/6P(含罗盘)接口 ,接入飞控的SERIAL PORT2(即UART2接口,线序为SDA1-SCL1-TX2-RX2-4V5-GND),(接线图跳转)。多数GPS的参数一般为38400 GPS。部分GPS模块的Speed波特率值可以到115200。(无罗盘的GPS只接4根线,即TX RX 5V GND)
如果使用ELRS/CRSF接收机,接收机需要使用2.54杜邦 4P接口
接入飞控TX6-RX6-4V5-GND ,SERIAL PORT6(即UART6接口),(接线图跳转)。
此类接收机的Speed波特率为115200,协议为RCIN。
注:飞控固件已经不支持PPM信号接收机,以及PWM信号接收机。
2.5.2. GPS模块设置
GPS需要使用2.54杜邦 4P/6P(含罗盘)接口 ,接入飞控的SERIAL PORT2(即UART2接口,线序为SDA1-SCL1-TX2-RX2-4V5-GND),(接线图跳转)。多数GPS的参数一般为38400 GPS。部分GPS模块的Speed波特率值可以到115200。(无罗盘的GPS只接4根线,即TX RX 5V GND)
 2.5.3. 数字图传天空端设置
数字图传天空端需要使用2.54杜邦 4P接口接入飞控SERIAL PORT1(即UART1接口,线序为TX1 RX1 9V GND),接线图跳转。
数字图传天空端,波特率参数一般为115200 DispiayPort。包括大疆O3、O4图传(需配套大疆G2、G3、N3眼镜,其中N3眼镜只能对接O4图传);蜗牛Caddx Avatar系列天空端;开源高清图传OpenIPC(如RunCam WiFiLink2);思翼天空端(如MK15、MK32、HM30);云卓天空端等。
如果使用大疆V1、V2眼镜,对应大疆老款天空端及Vista,则使用UART1接口的Protcol值选择DJI FPV。
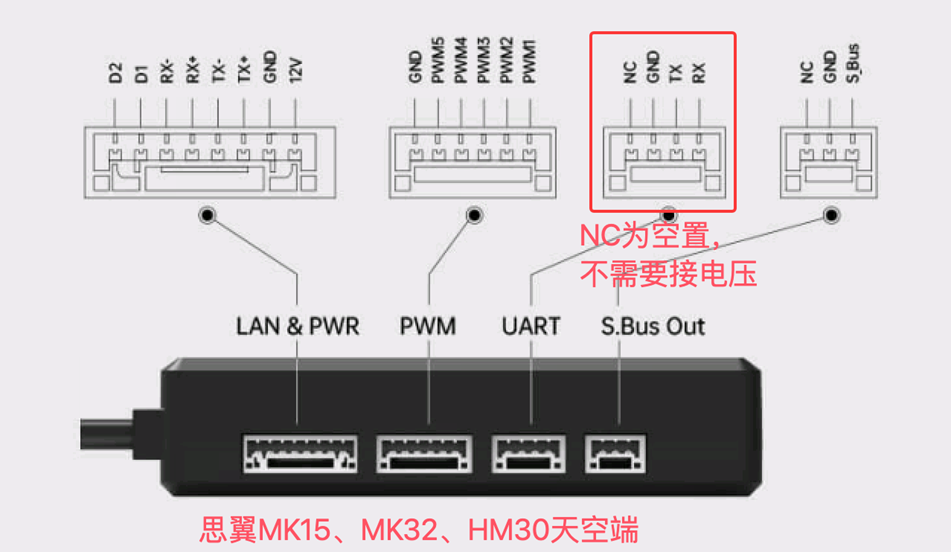
思翼数传遥一体模块,波特率参数为115200 Mavlink2。使用GH1.25-4Pin转杜邦4P信号线连接一体模块与飞控(gh1.25-4pin中NC为空置,不需要接电压。线序为空 GND RX1 TX1)。
2.5.3. 数字图传天空端设置
数字图传天空端需要使用2.54杜邦 4P接口接入飞控SERIAL PORT1(即UART1接口,线序为TX1 RX1 9V GND),接线图跳转。
数字图传天空端,波特率参数一般为115200 DispiayPort。包括大疆O3、O4图传(需配套大疆G2、G3、N3眼镜,其中N3眼镜只能对接O4图传);蜗牛Caddx Avatar系列天空端;开源高清图传OpenIPC(如RunCam WiFiLink2);思翼天空端(如MK15、MK32、HM30);云卓天空端等。
如果使用大疆V1、V2眼镜,对应大疆老款天空端及Vista,则使用UART1接口的Protcol值选择DJI FPV。
思翼数传遥一体模块,波特率参数为115200 Mavlink2。使用GH1.25-4Pin转杜邦4P信号线连接一体模块与飞控(gh1.25-4pin中NC为空置,不需要接电压。线序为空 GND RX1 TX1)。
 2.5.4. 飞控板载蓝牙数传模块设置
2.5.4. 飞控板载蓝牙数传模块设置
AET H743 Basic飞控板载蓝牙数传模块,直接对应SERIAL PORT7(即UART7接口)。 则该接口的参数选择 115200 Mavlink2
2.5.5. 其他数传模块设置
外置数传模块推荐连接飞控板的TX3 RX3,对应UART3接口 常用数传的参数一般为: 115200 Mavlink2
2.5.6. 光流测距传感器设置
SH1.0-4P转2.54杜邦 4P接口连接线,连接飞控板的TX8-RX8-4V5-GND,对应UART8接口。 常用数传的参数一般为: 115200 Mavlink1
2.5.7. 串口设置案例
 UART1接口,接数字图传天空端(思翼UART口,115200,MavLink2),
UART1接口,接数字图传天空端(思翼UART口,115200,MavLink2),
UART2接口,接GPS模块(uart2及i2c并行接口,38400,GPS),
UART4接口,接飞蛋进阶空速计(i2c并行接口,不用波特率及协议),
UART6接口,接ELRS接收机(思翼s.bus,115200,RCIN),
UART7接口,接飞控板载蓝牙数传模块(115200,MavLink2),
UART8接口,接光流测距传感器(115200,MavLink1)。
提2:卸下螺旋桨!再接电池!电机附近不要有其他物品!
前提3:遥控器开机,遥控器与接收机正常对频。如果接收机与飞控的连接不正确或者对应串口设置不正确,在遥控器校准页面则看不到Thrttle油门信号、5~16通道的通道信号值。如下图所示:
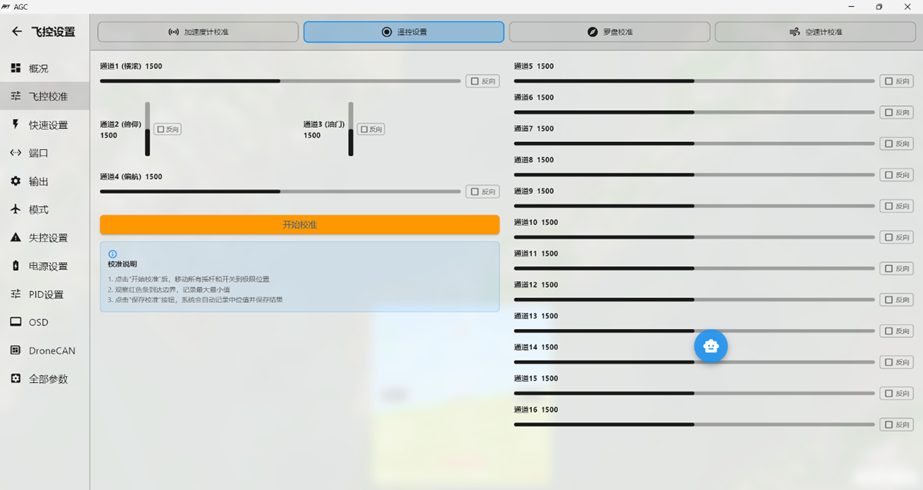 如果接收机与飞控连线正确且对应的串口设置正确则可以看到所有通道,推动遥控器有反应
如果接收机与飞控连线正确且对应的串口设置正确则可以看到所有通道,推动遥控器有反应
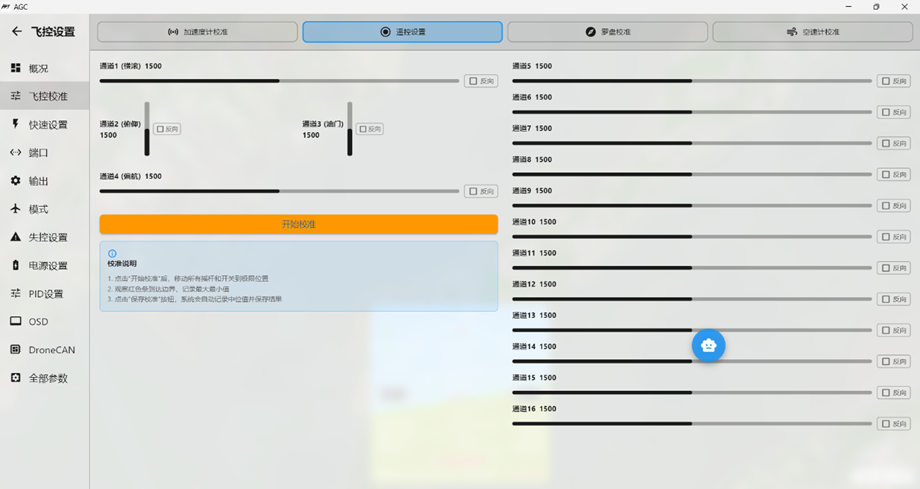 此时我们开始对遥控器的摇杆及其他开关通道进行校准。
此时我们开始对遥控器的摇杆及其他开关通道进行校准。