新页面
U7飞控agc调参说明
一.确认自己的机型
二.刷写(烧录)固件
三.外设的接线与设置
四.飞控基础调参
五.飞行模式设置
六.各飞行模式下的细则参数
七.失控保护
一.确认自己的机型
U7飞控支持多旋翼(arducopter)、直升机(traditional copter)、固定翼(arduplane)、垂起(包含Y3.4+1)、车(ardurover)、船(ardurover)。机型所对应的固件如下
多旋翼:
传统直升机:(apj结尾的是用mp刷写的,with_bl的通过agc刷写,我们这里使用agc刷写)
固定翼、垂起(包含Y3、X4和4+1):
注意事项:请严格按照文件名字寻找固件刷写,hex 固件请用 DFU 模式烧录,例如 STM32CubeProgrammer, MissionPlanner 1.3.82 以上版本,或者 INAV Configurator。 apj 固件请在确定板子 bootloader 类型是 AET 板子后(例如你已经烧过 AET 的 hex 固件),再使用 MissionPlanner 烧录。
二.刷写(烧录)固件
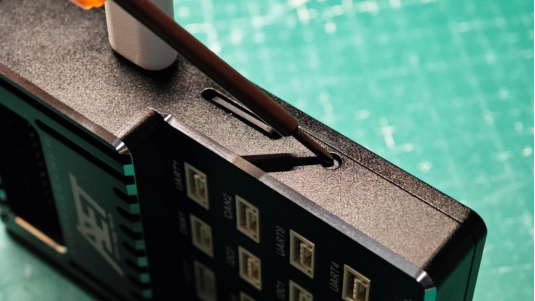
1.按住飞控的Boot按键不放,使用USB-TYPEC数据线把飞控与电脑连接
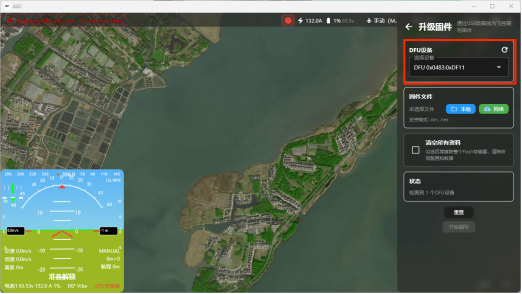
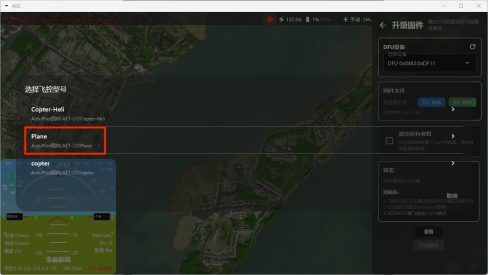
2.右上角齿轮点开,最下面一个升级固件点进去,DFU设备这里点一下刷新,会自动选择飞控
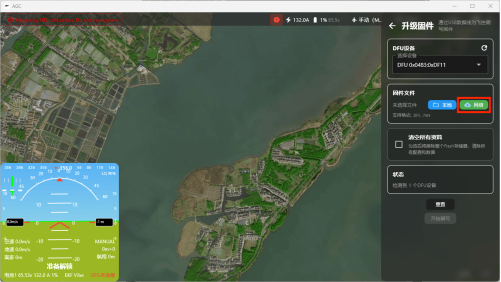
3点击固件文件的“网络”选项(绿色)
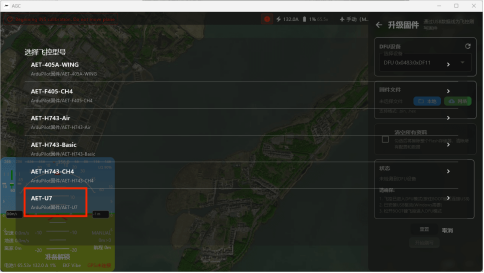
4.选择最下方的“AET-U7”进入
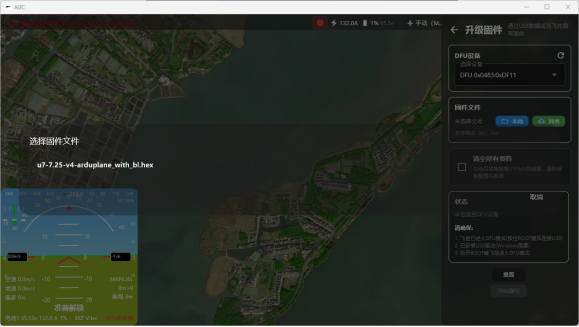
5.选择想刷的固件,这里以固定翼(Arduplane)举例
6.点击固件文件
7.勾选清空所有资料(图片里没有勾选,实际是需要勾选的),点击开始刷写(蓝色)
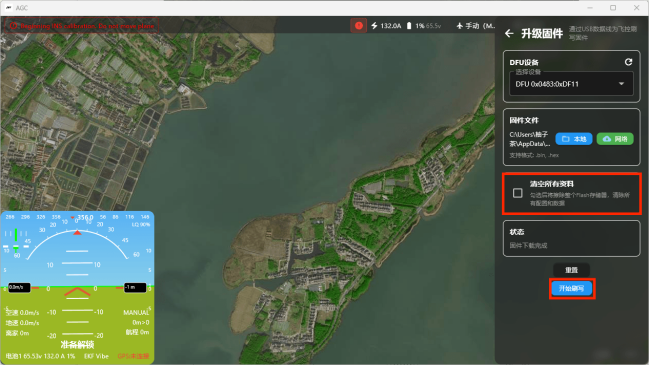
注意事项:等待固件刷写期间禁止将飞控与电脑断联
二.外设的接线与设置
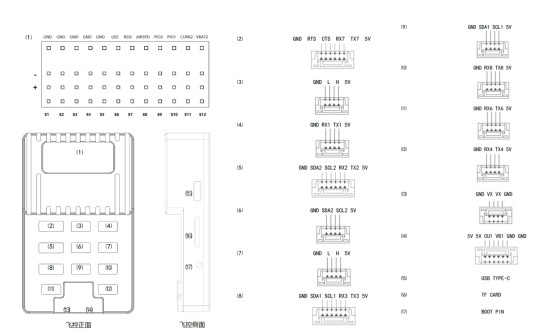
请根据此图进行外设与飞控的线序比对
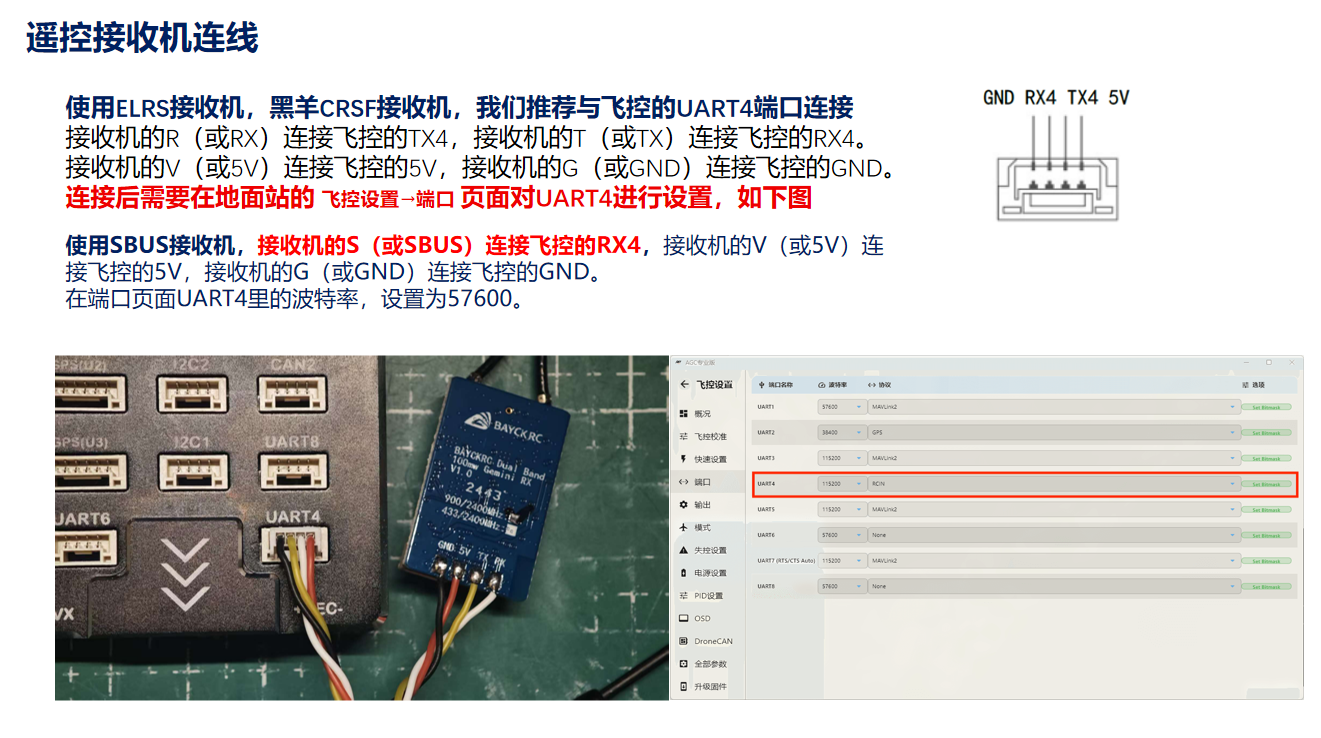
1.接收机
2.UART协议GPS

3.CAN协议GPS
请使用CAN协议GPS包装内附赠的连接线连接GPS到CAN1口

4.wifi数传设置

5.PMU连接
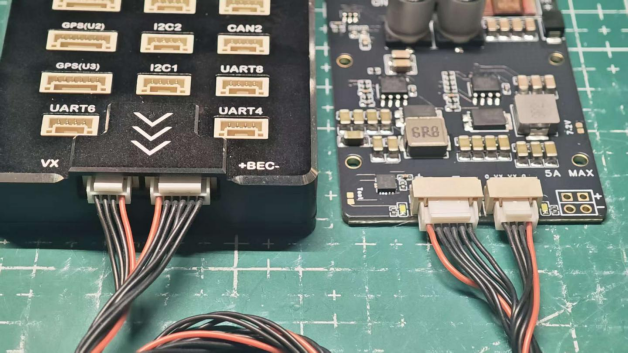
6.电调连接

飞控的定时器分组为12 3456 78910,同一个分组内不能同时存在舵机和电调(电机),只能二选一!
建议使用Dshot协议,飞控默认输出PWM协议,如下是PWM改DSHOT教程:
在 飞控设置→全部参数 页面上方的搜索框搜索 BLH

在出现的参数中:
SERVO_BLH_AUTO = 1
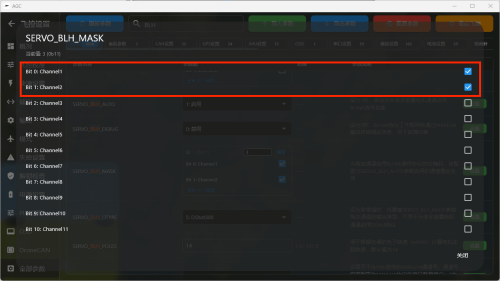
BLH_MASK点开
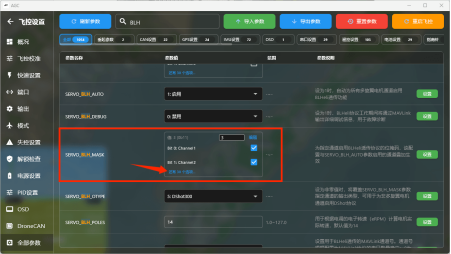
你的电调插在S几(飞控上有写),就在这里勾选Channel几
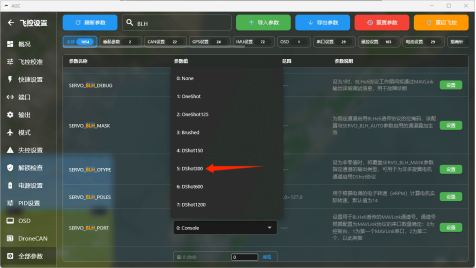
BLH_OTYPE:改成你电调支持的协议,一般建议Dshot300
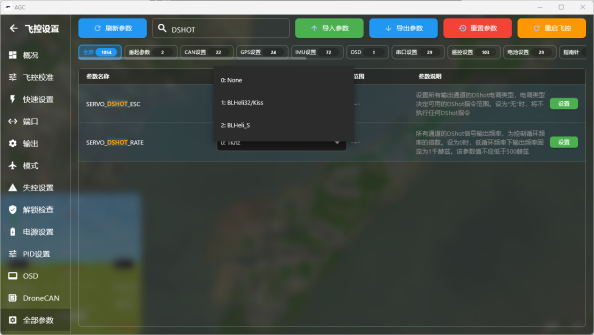
上方搜索栏中搜索SERVO_DSHOT_ESC:选择你的电调的固件
全部改完之后需要将飞控完全断电重启以更新设置
四、飞控基础调参
1.在飞控设置→飞控校准界面 第一项加速度计校准,选择六面校准,点击开始校准
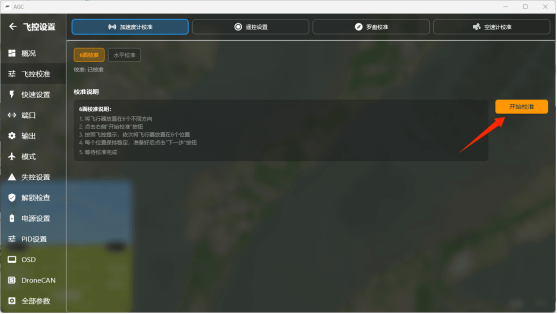
弹出页面中点击确定

根据图片提示完成六面校准,每放好一个面点击一次下一步
完成后弹出校准成功。
水平校准:可在飞机装好后,飞机平放,然后执行一次校准即可
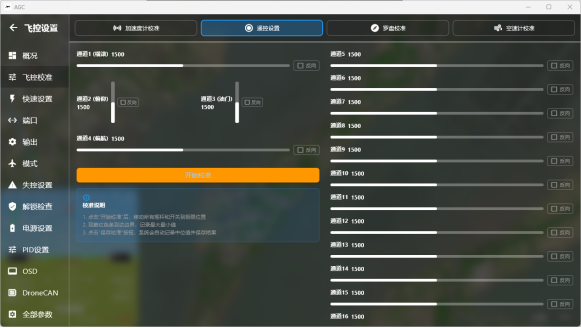
2.遥控器校准(请在接收机设置好后开始)
点击开始校准,按照提示进行校准
3.校准舵机
在安装电调那一节,应当同时也安装好了舵机的线,接下来进行舵机的设置,这里以双发固定翼布局为例

如图:请将电调插在S1S2,副翼插在S3S4,升降舵插在S5,方向舵插在S6
单发尾推飞翼如下图:

尾推V尾固定翼如下图:

设置好舵机后,将飞行模式切换到FBWA,不要动遥控器,拿起飞机上下左右摇晃观察舵面反应:
飞机抬头,升降舵下翘;
飞机低头,升降舵上翘;
飞机左滚转,副翼右上左下,方向舵右偏;
飞机右滚转,副翼左上右下,方向舵左偏。
如有不同的,将反向打钩进行反向
接下来进行手动模式的校准:遥控器操作拉杆,升降舵上翘;遥控器操作推杆,升降舵下翘;遥控器操作左滚转,副翼左上右下;遥控器操作右滚转,副翼右上左下;遥控器操作左方向,方向舵左偏;遥控器操作右方向,方向舵右偏。如有反过来的,在遥控器上修改通道反向。
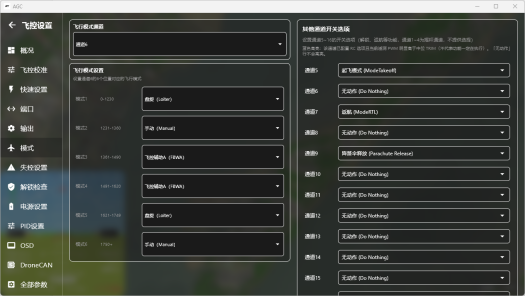
4.飞行模式设置
在飞控设置→模式界面左侧的飞行模式设置里,根据自己需要调整飞行模式,默认的模式切换通道若不满意可以在上方的飞行模式通道内更改成你想要的。 右侧的其他通道开关选项中的通道不能与飞行模式通道一样
MANUAL 手动模式,完全脱离飞控参与
CIRCLE 盘旋模式
STABILIZE 自稳模式。简单的自稳模式,只会控制飞机回中,保持水平,可以用遥控控制姿态。如果觉得FBWA模式动作太过迟缓可以开启这个模式。
FBWA 增稳模式。根据设置倾角和俯仰角,并很好的保持姿态,高度通过油门控制,推荐新手使用的模式。
FBWB 增稳定高模式。在FBWA基础上会很好的保持高度。
CRUISE 巡航模式。定高定向飞行(远航强烈推荐使用)
ACRO 姿态锁定模式,类似于穿越机的手动模式,松杆后锁定姿态。
AUTOTUNE 自动调参模式
AUTO 自动航点模式
LOITER 留待模式。即在当前定位点上空以设置的高度和半径绕圈等待。
RTL 返航模式。自动直线返航到家的位置上空以设置的高度和半径盘旋
TAKEOFF 辅助抛飞模式
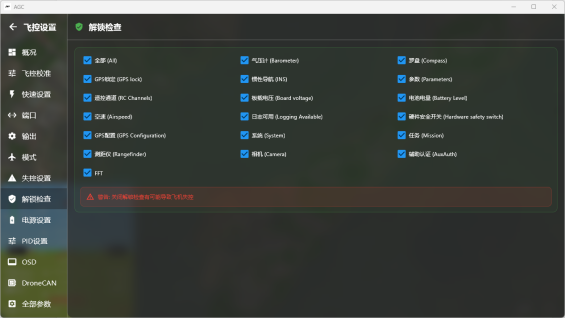
5.解锁自检
在解锁检查界面,勾选需要启用的解锁前检查,建议不要全部关掉。