第三章:基础调参-六面校准、指南针、舵机电机设置
第1节:地面站连接与重置默认参数。 打开MissionPlanner调参软件。
 玩家若无法加载实时卫星地图,地面站的“飞行任务”页面,右边选择地图源。一般建议选择“高德卫星地图”。选择后关闭地面站,点击运行MissionPlanner调参软件,此后地面站的地图源则在线调用“高德卫星地图”
玩家若无法加载实时卫星地图,地面站的“飞行任务”页面,右边选择地图源。一般建议选择“高德卫星地图”。选择后关闭地面站,点击运行MissionPlanner调参软件,此后地面站的地图源则在线调用“高德卫星地图”

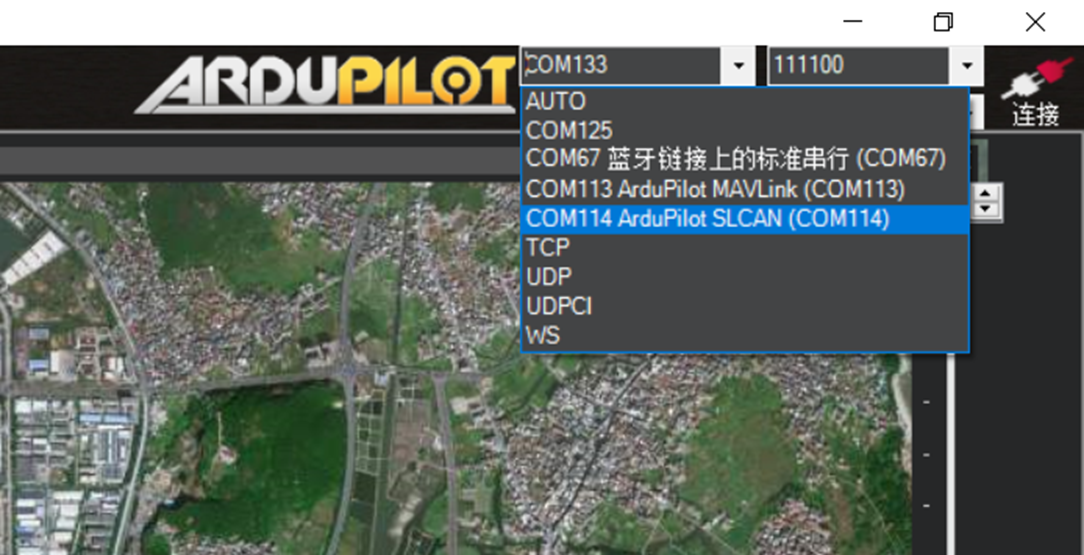
使用Type-C数据线把飞控与电脑连接,在MP软件右上角选择飞控对应的端口,如下图:
 点击连接,稍等几秒,软件在读取飞控的数据。
点击连接,稍等几秒,软件在读取飞控的数据。
 连接成功
连接成功
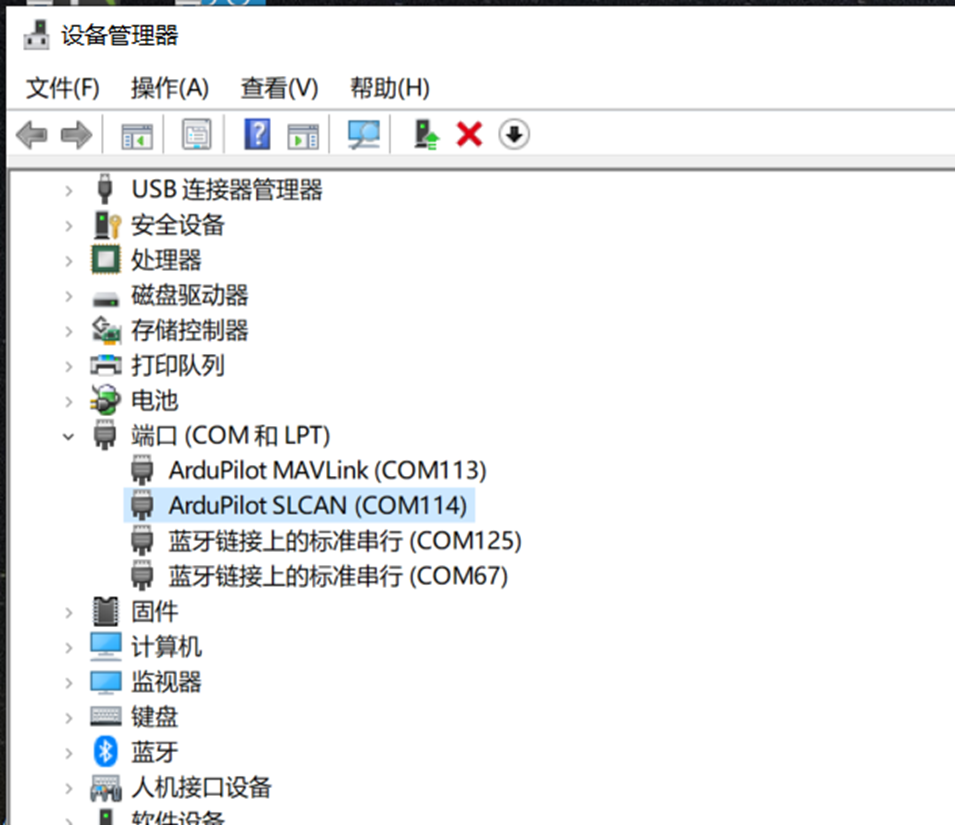
若连接USB后无法在端口下拉菜单中找到飞控选项。则需要检查电脑是否正确识别飞控驱动程序并分配端口。在电脑的设备管理器的端口栏进行查看。若没有分配端口号,则需要安装对应的驱动程序。
我们可以通过下图预览一下调参界面第一页概览

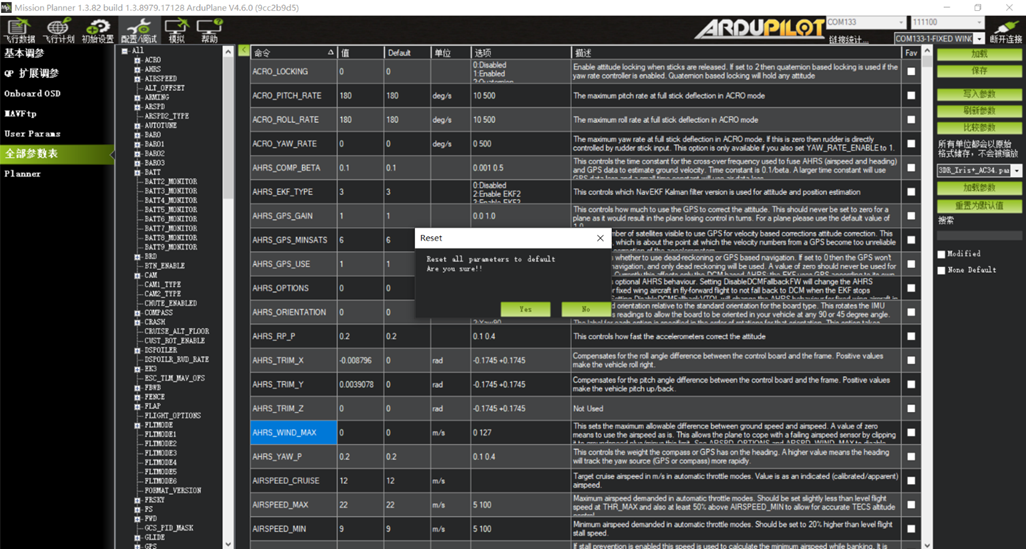
新固件刷写后,强烈建议先进行一次“重置默认参数”
操作为:“配置调试”--“全部参数表”--“重置默认参数”。
点击一次,地面站提示确认。点击yes即可。
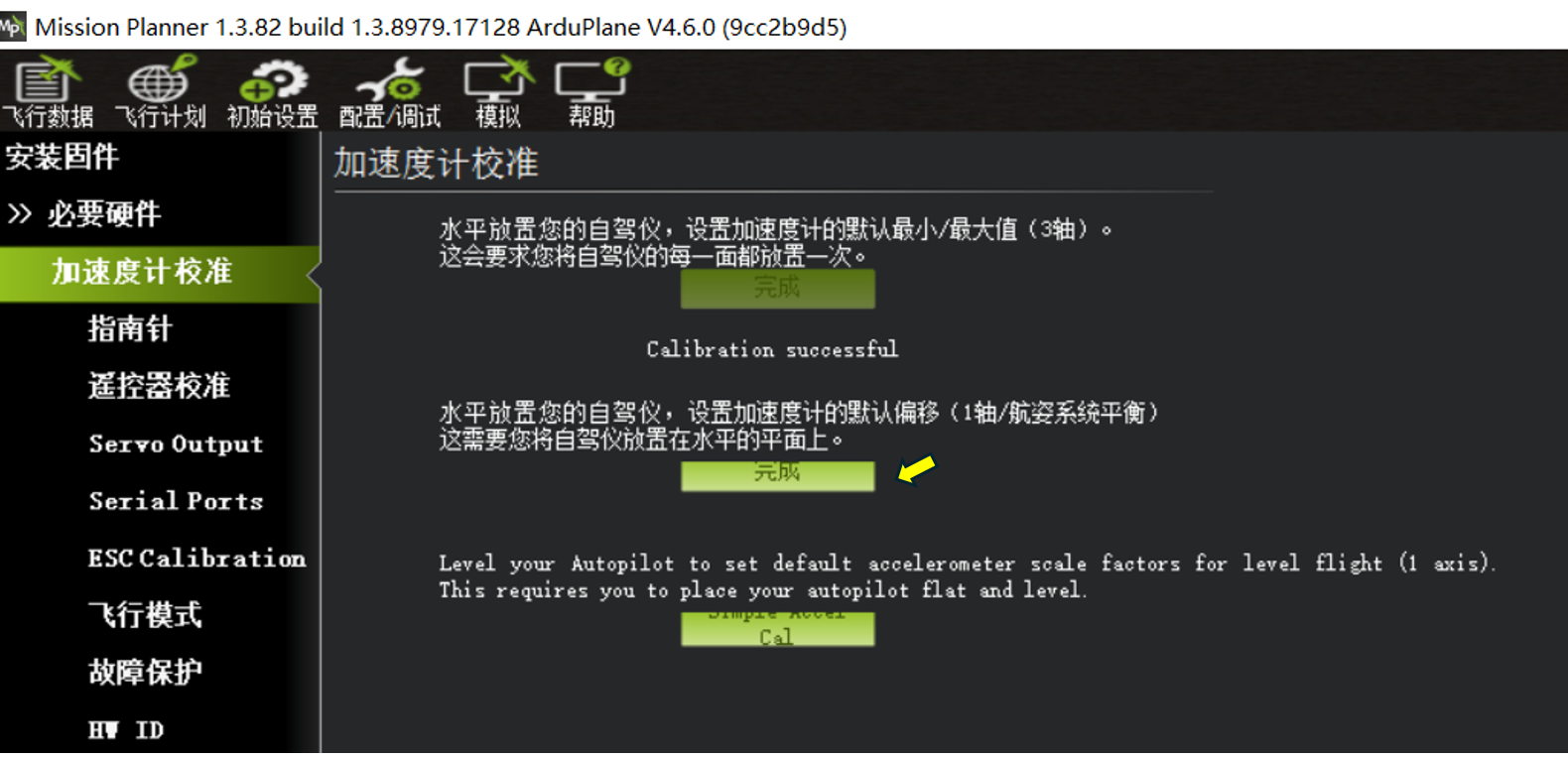
第2节:进行加速度计校准及水平校准
点击初始设置,加速计校准,
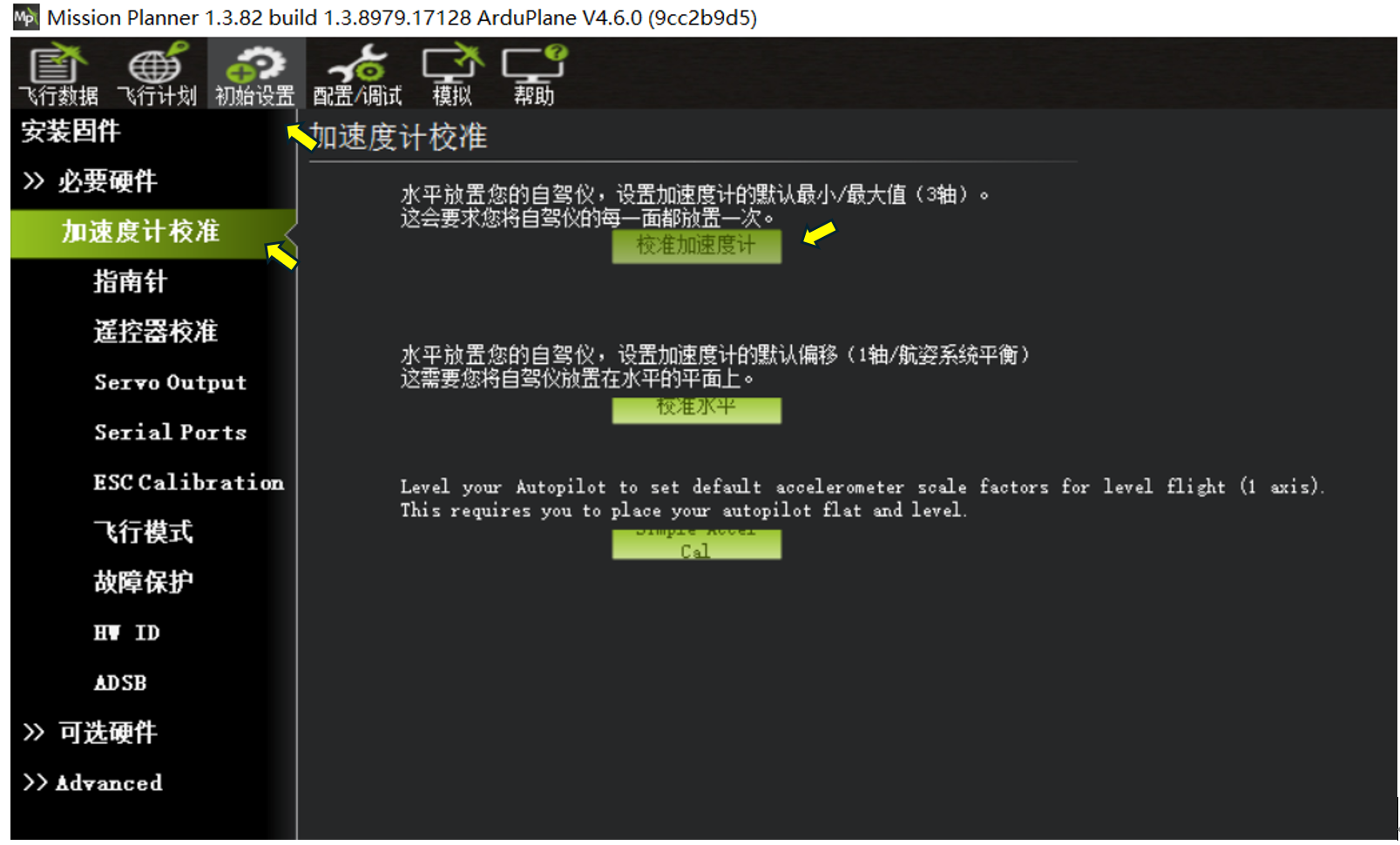
点击校准加速度计,根据软件提示,翻转飞控的六面,点击“校准加速度计”,依据提示对飞控的6个面进行校准。如下图
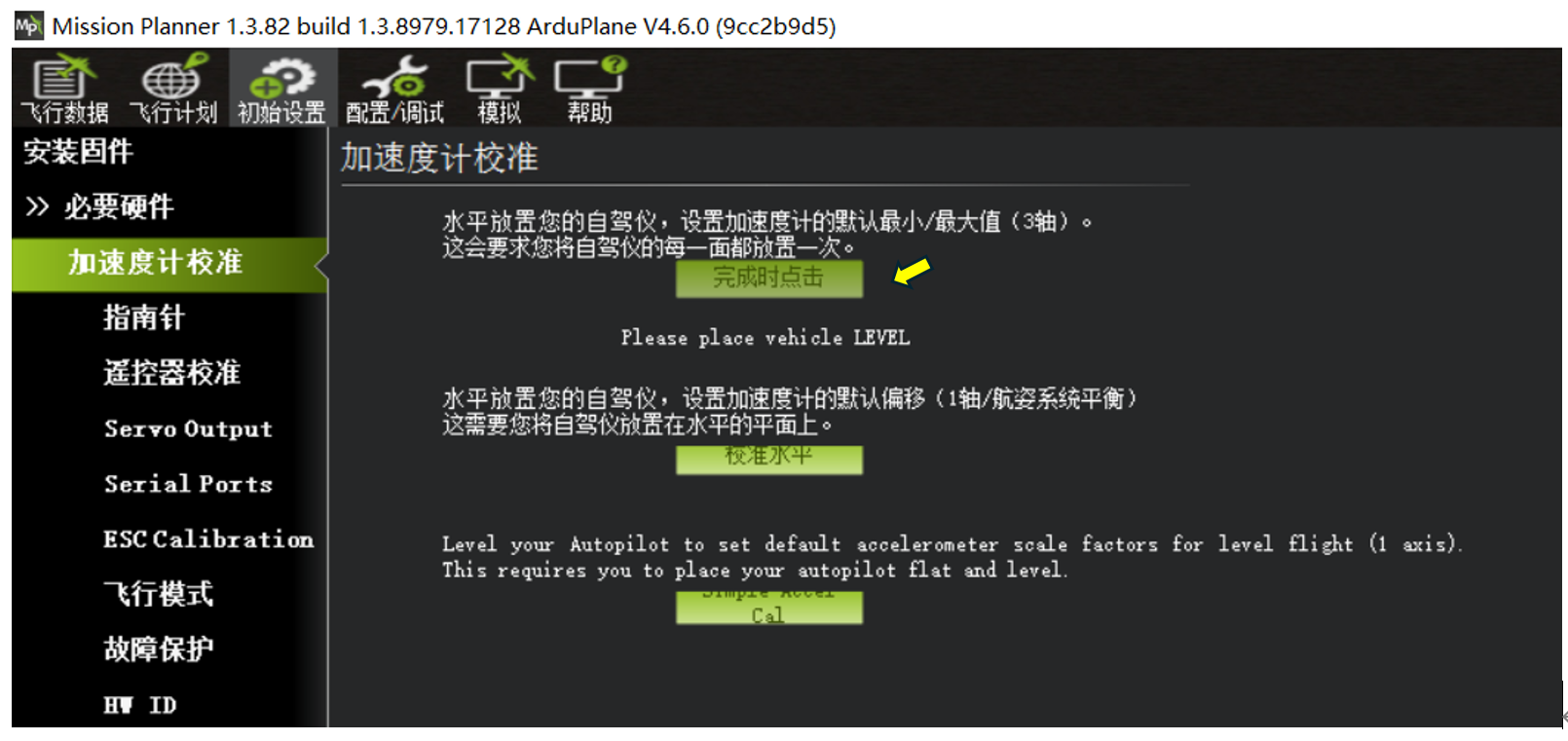
Please place vehicle LEVEL加速计校准--底面朝下,如下图
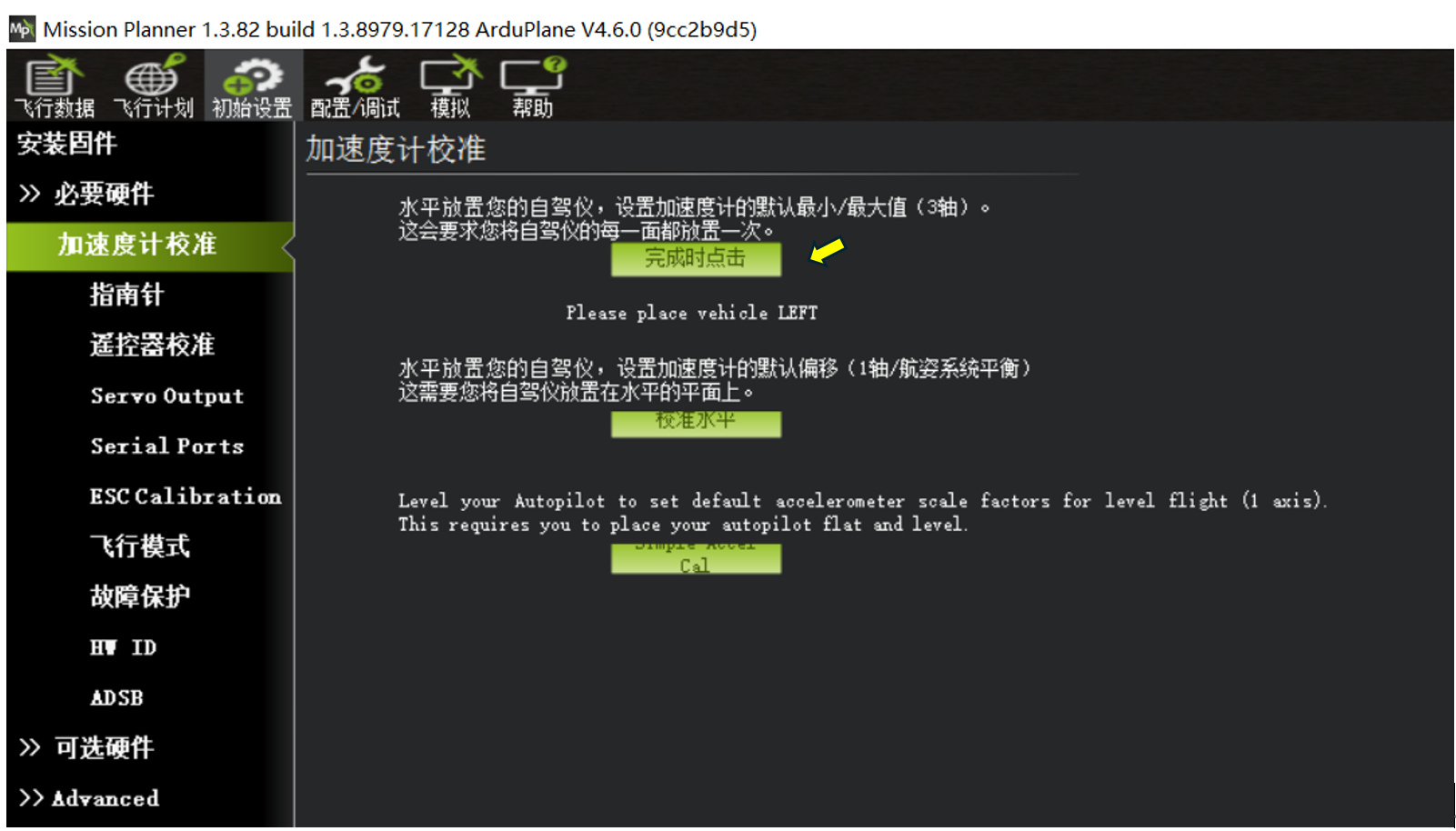
Please place vehicle LEFT加速计校准--左面朝下, 如下图
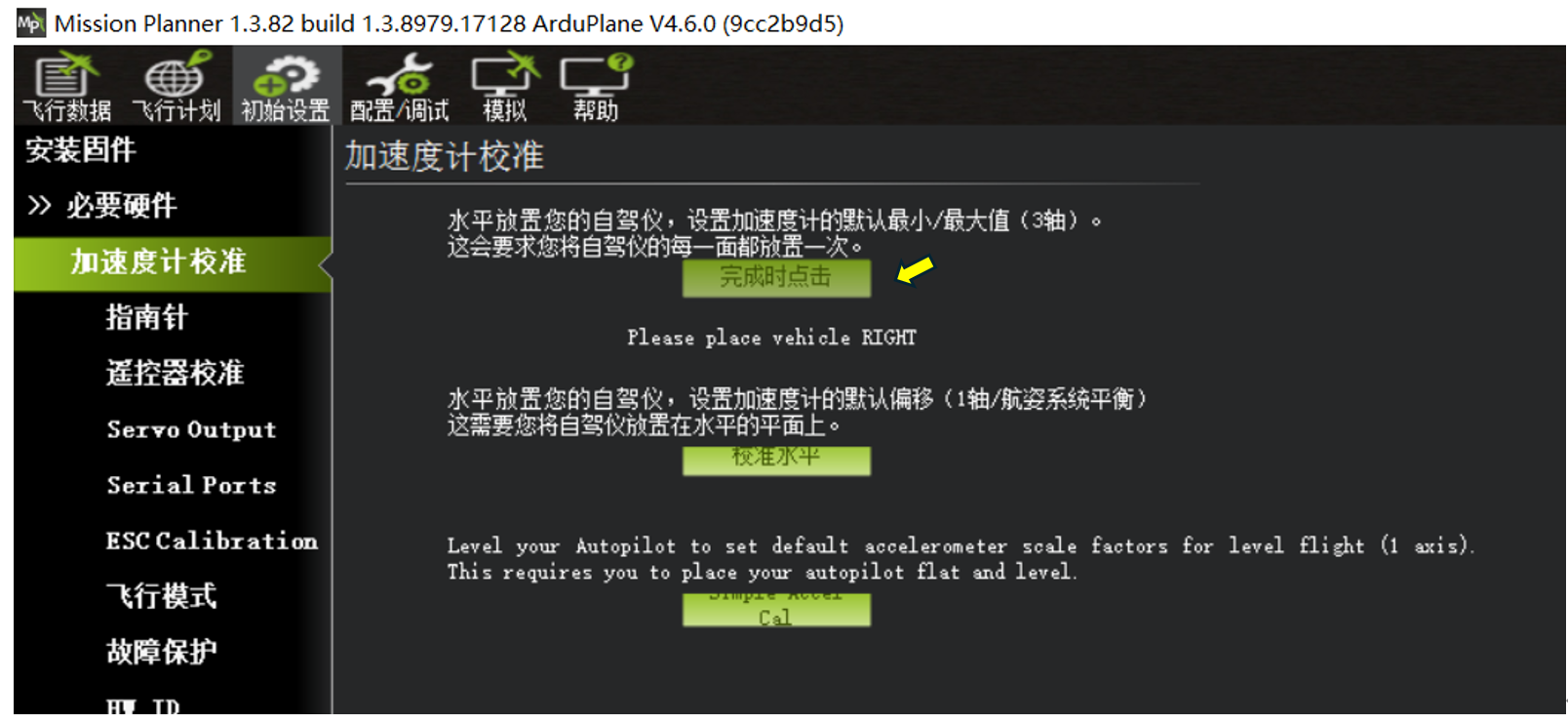
Please place vehicle RIGHT加速计校准--右面朝下
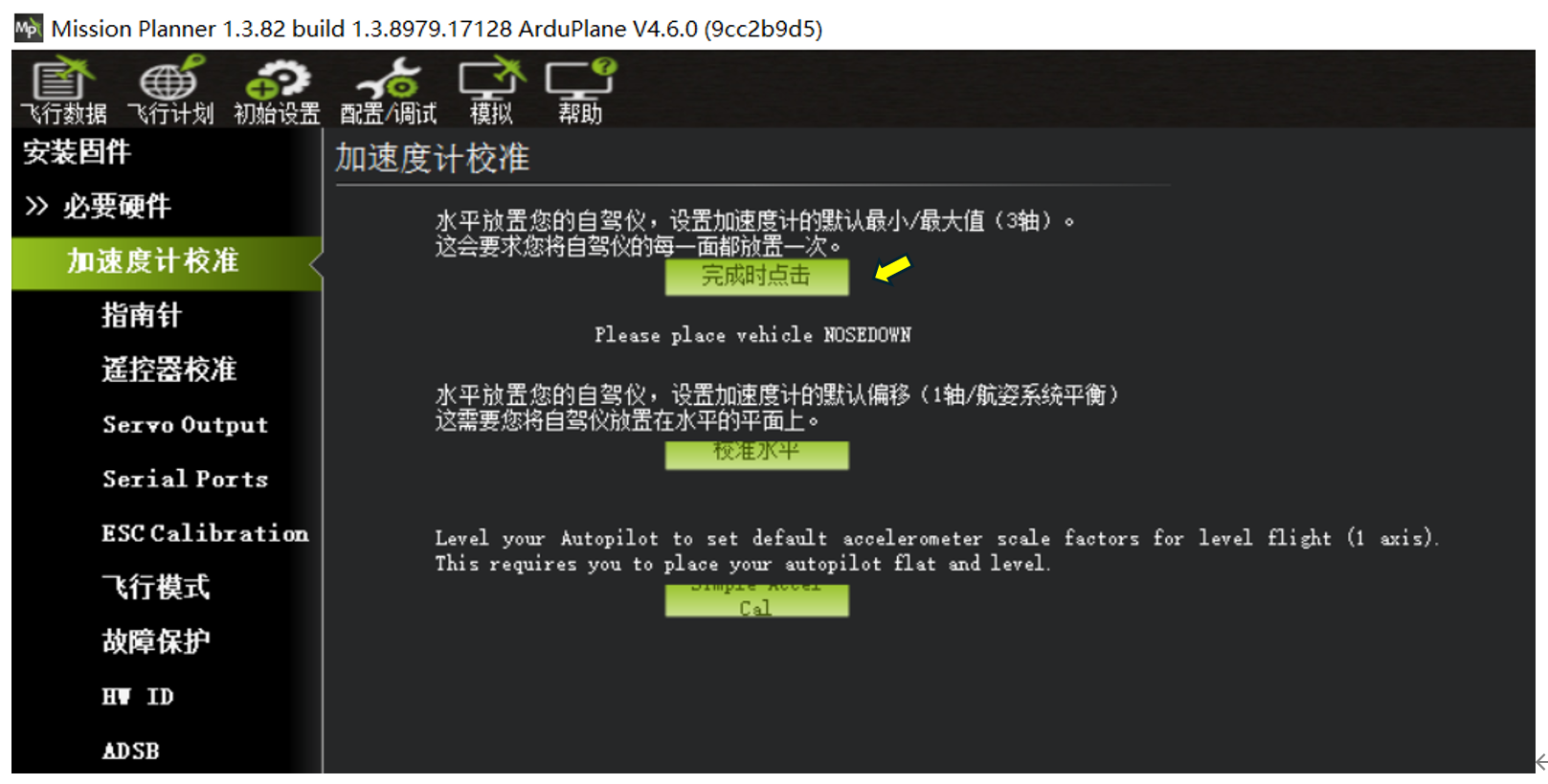
Please place vehicle NOSEDOWN加速计校准--前面朝下
[ ]
(https://doc.aeroeggtech.com/uploads/images/gallery/2025-10/image-1759472720499.png)
]
(https://doc.aeroeggtech.com/uploads/images/gallery/2025-10/image-1759472720499.png)
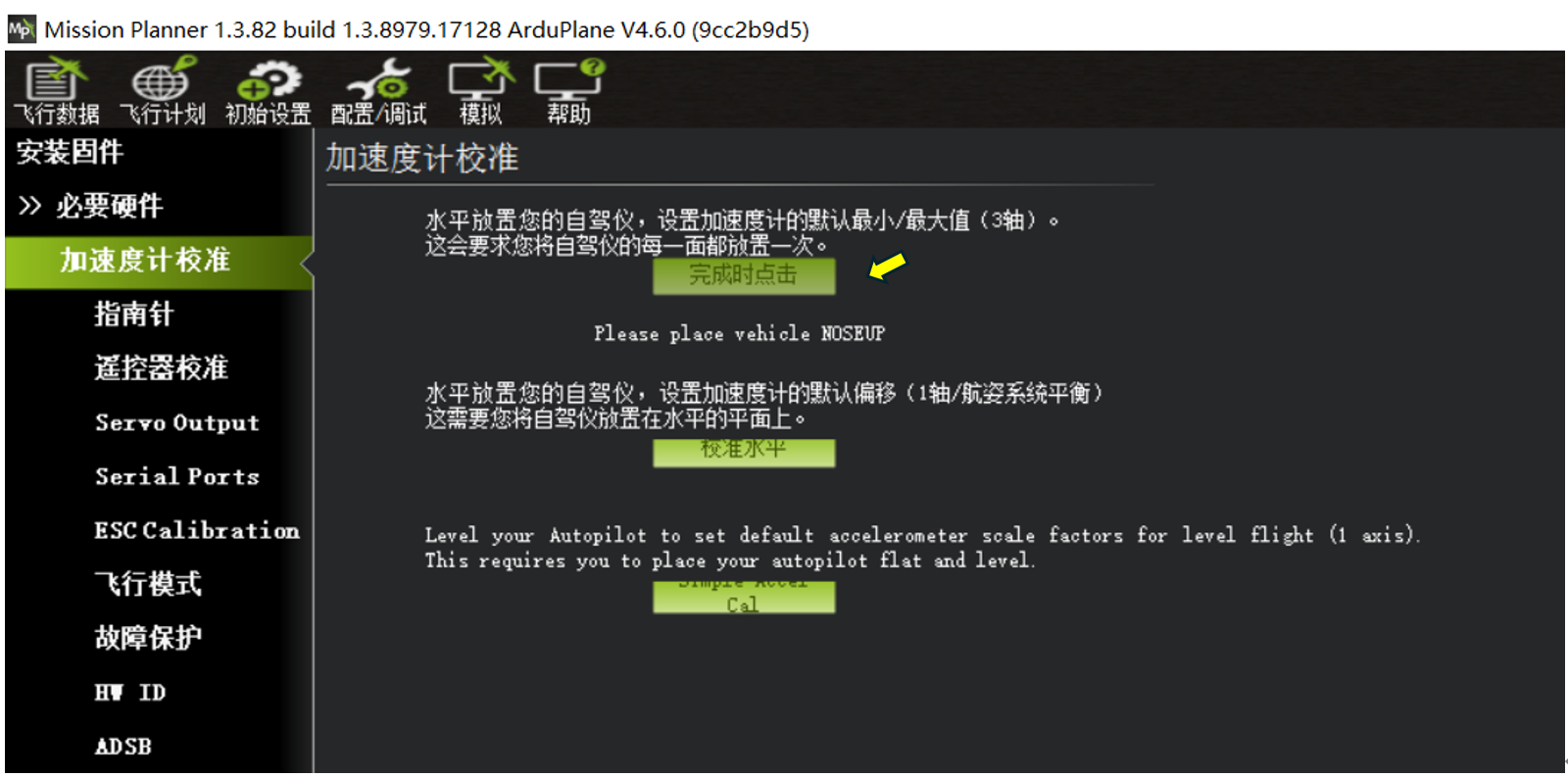
Please place vehicle NOSEUP加速计校准--后面朝下

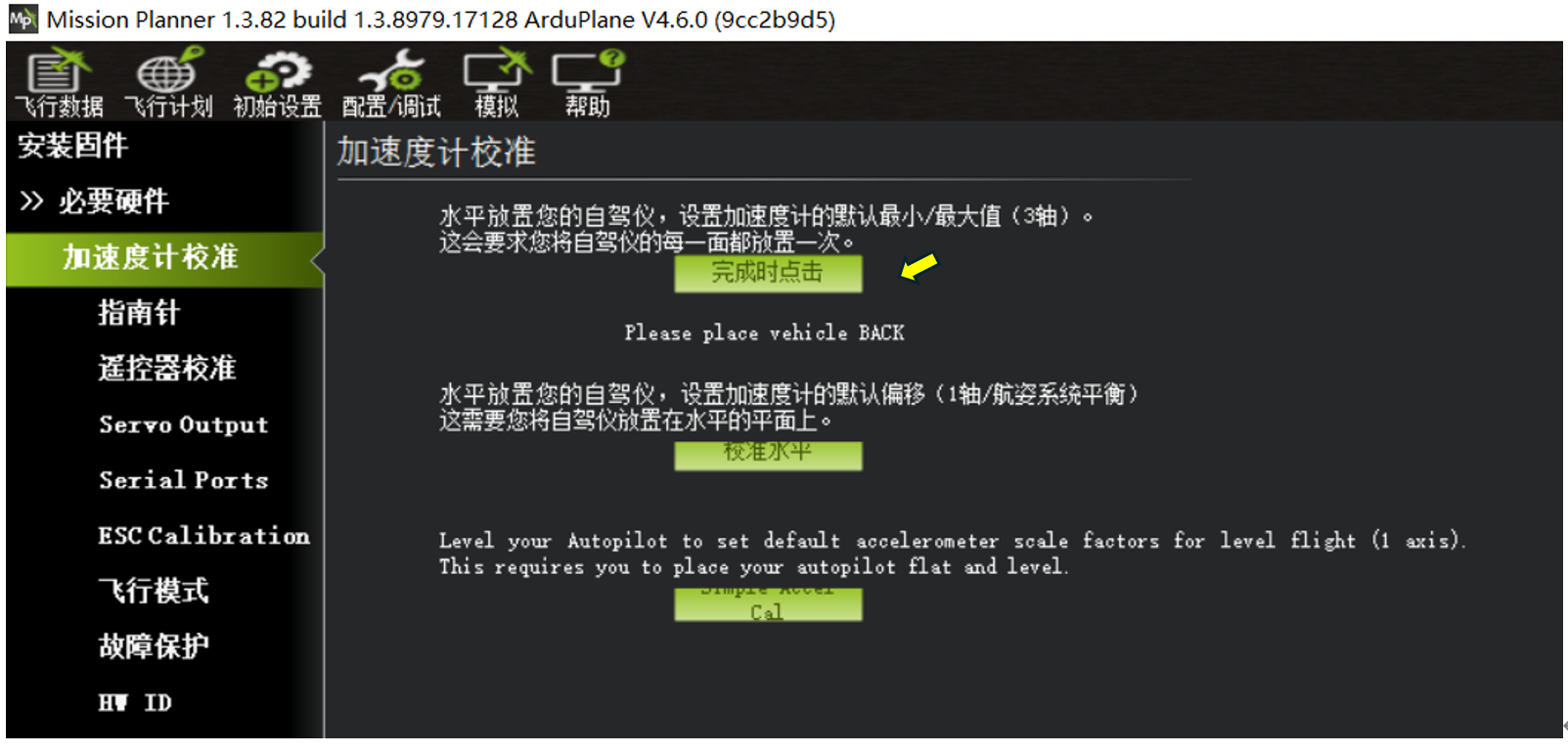
Please place vehicle BACK加速计校准--顶面朝下
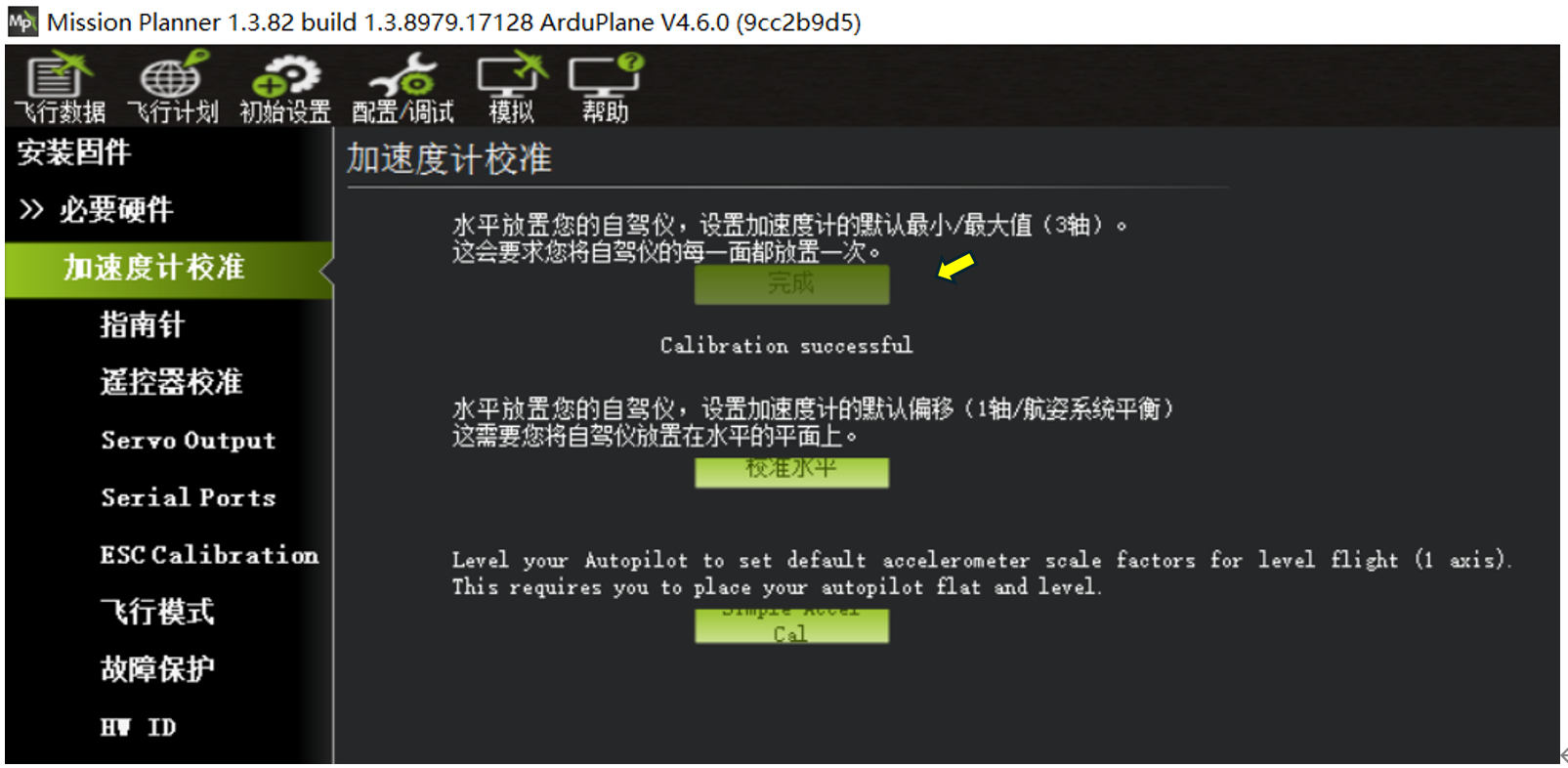 校准完成
校准完成
校准水平,可以在飞控装机后,飞机平放,然后执行一次校准水平即可。
第3节:指南针设置
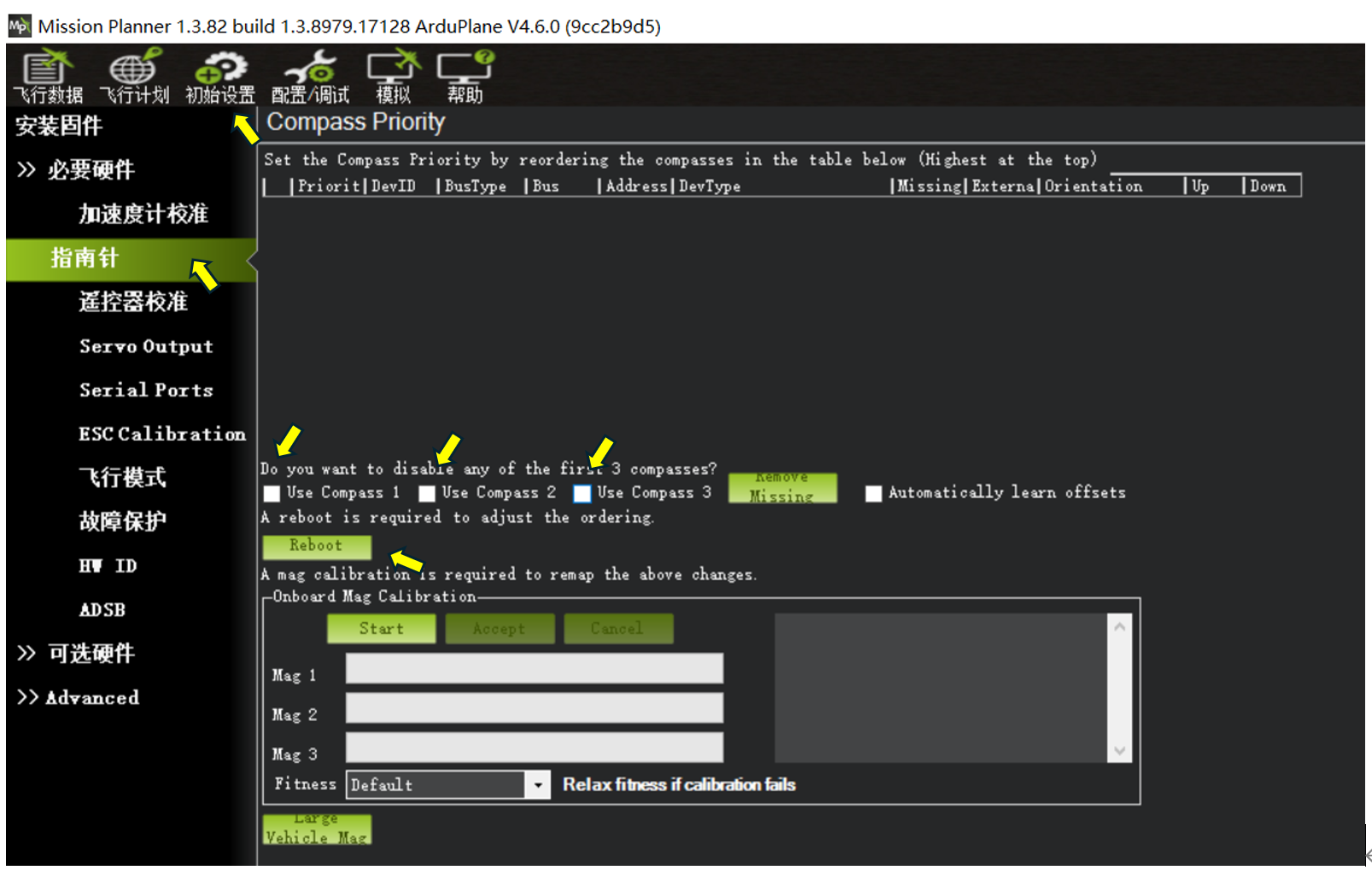
固定翼基础使用过程中,指南针(电子罗盘)非必须安装。
我们可以关闭飞控预开启的指南针选项。
在初始设置—指南针 页面,
取消勾选:Use Compass1,Use Compass2,Use Compass3
点击Reboot 重启飞控。
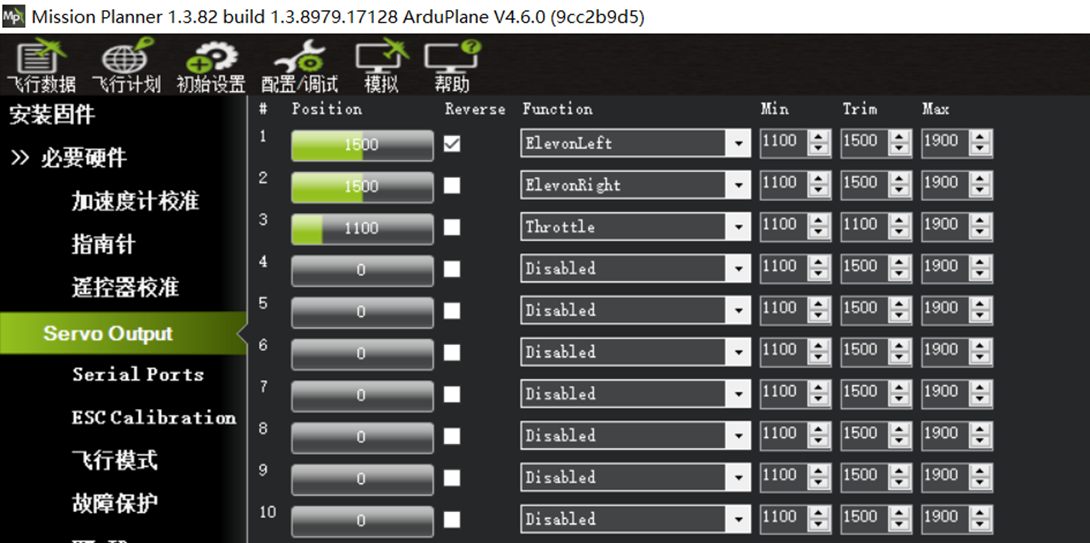
第4节,舵机机电调自定义设置Servo Outputs
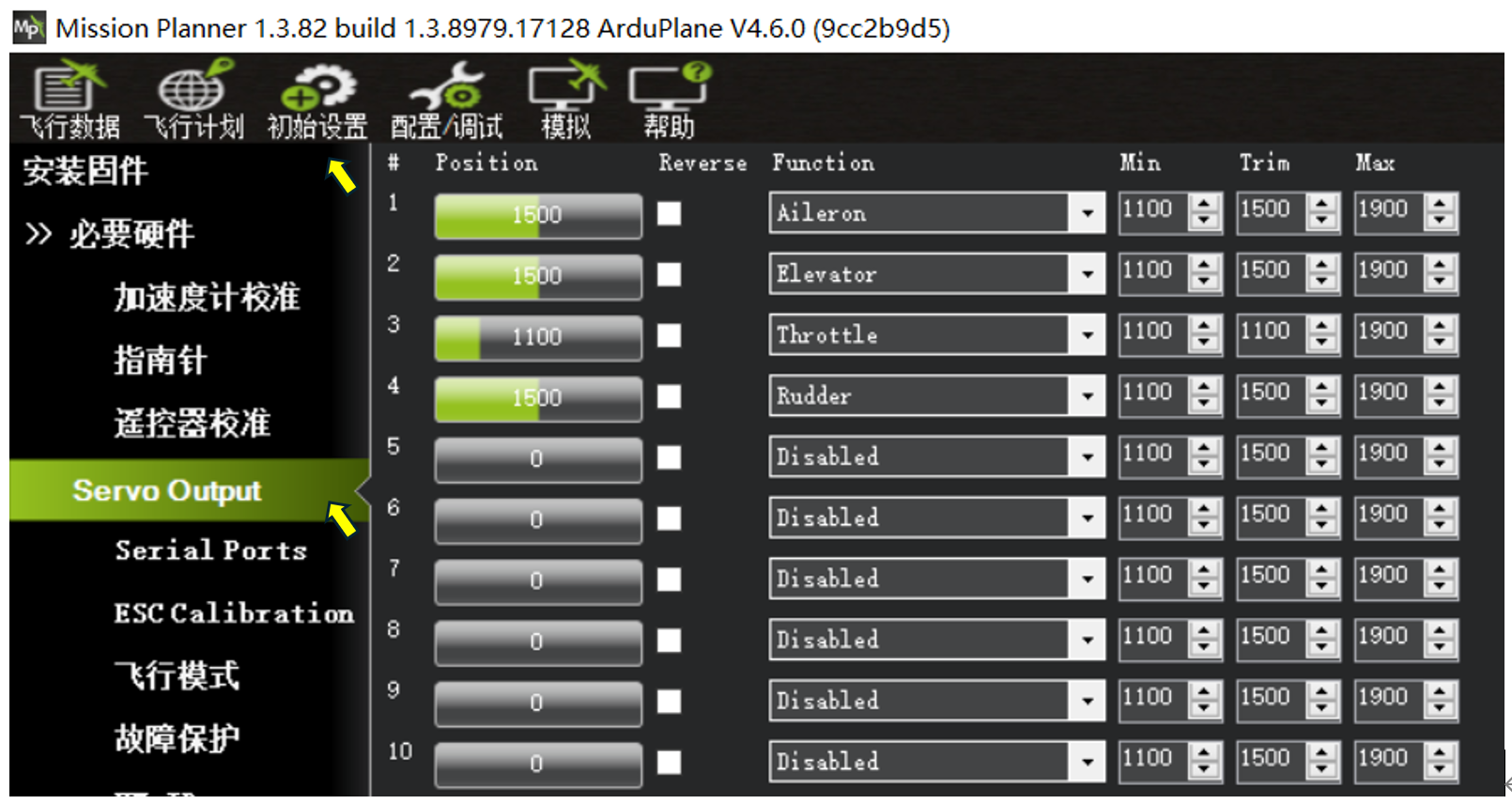
Ardupilot固件对飞控的S1~S10的输出支持完全自定义,
上图对应的#1即为飞控的S1,#2即为飞控的S2,以此类推。
默认参数为常规布局的AETR模式,如上图
Aileron 为副翼横滚舵机
Elevator为俯仰升降尾舵机
Throttle为电调油门信号
Rudder为垂直方向舵机

每个Servo输出通道都可以在对应的下拉菜单中选择定义,这是Ardupilot固件最有特点的地方之一。修改Servo的自定义设置,需要重启飞控才能生效。 我们常见的定义类型如下:
Aileron 为副翼横滚舵机
Elevator为俯仰升降尾舵机
Throttle为电调油门信号
Rudder为垂直方向舵机
ElevonLeft 飞翼左舵机(副翼升降混控)
ElevonRight 飞翼右舵机(副翼升降混控)
ThrottleLeft 双发差动左电机电调油门信号
ThrottleRight 双发差动右电机电调油门信号
VTailLeft V尾左舵机(升降方向舵混控)
VTailRight V尾右舵机(升降方向舵混控)
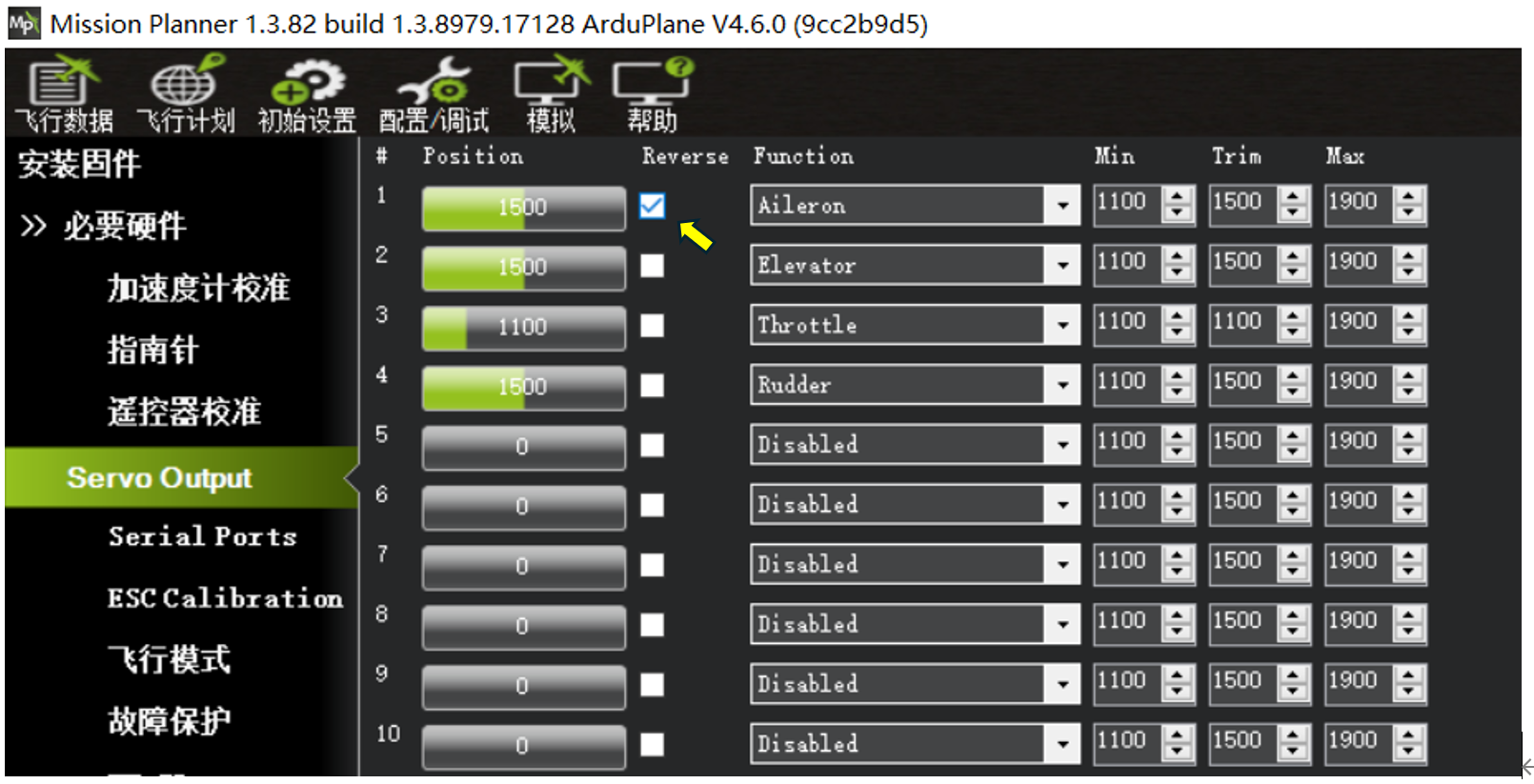
Ardupilot的通道输出为实时输出,后期进行通道辅助修正调整的时候,发现飞控执行飞机姿态修正的时候,通道输出方向错误,在对应通道的"Reverse"处勾选,对应通道的输出即可反向。
举例1:用户装一台单发尾推飞翼(ARWING,自由者等),选择S1接飞翼左舵机,则#1设置为ElevonLeft,在装机调试过程中发现该舵机输出方向反,则勾选#1的Reverse使该舵机输出动作反向。选择S3接电调信号线,则#3设置为Throttle。

举例2:用户装一台3D打印飞机的双发V尾机型,使用双电机差动控制。副翼2个舵机接在S1,S2。则#1、#2都可以设置为Aileron。S3接左边机翼的电调信号,则#3设置为ThrottleLeft。S4接右边机翼电调信号,则#4设置为ThroleLeft。S5接V尾的左舵机,#5设置为VTailLeft,S6接V尾的右舵机,则#6设置为VTatlRight。
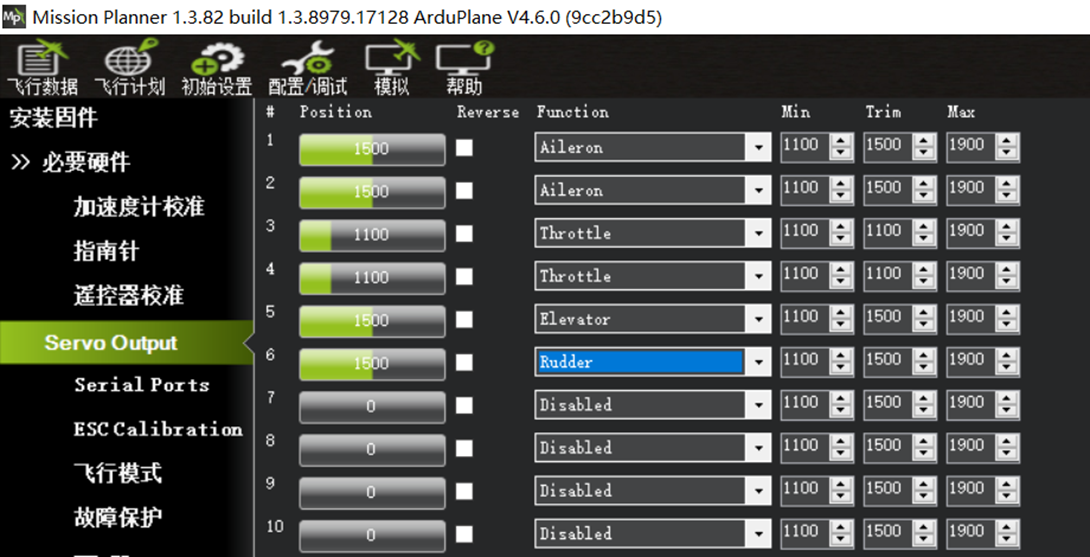
举例3:用户装一台大白鲨(肥翁),典型的传统翼型布局双发动力,不想使用双发差动控制。副翼2个舵机接在S1,S2。则#1、#2都可以设置为Aileron。S3/S4可任意选择接两边机翼的电调信号,则#3#4设置为Throttle。S5接平尾的升降舵机,#5设置为Elevator,S6接尾的垂直尾翼方向舵机,则#6设置为Rudder。
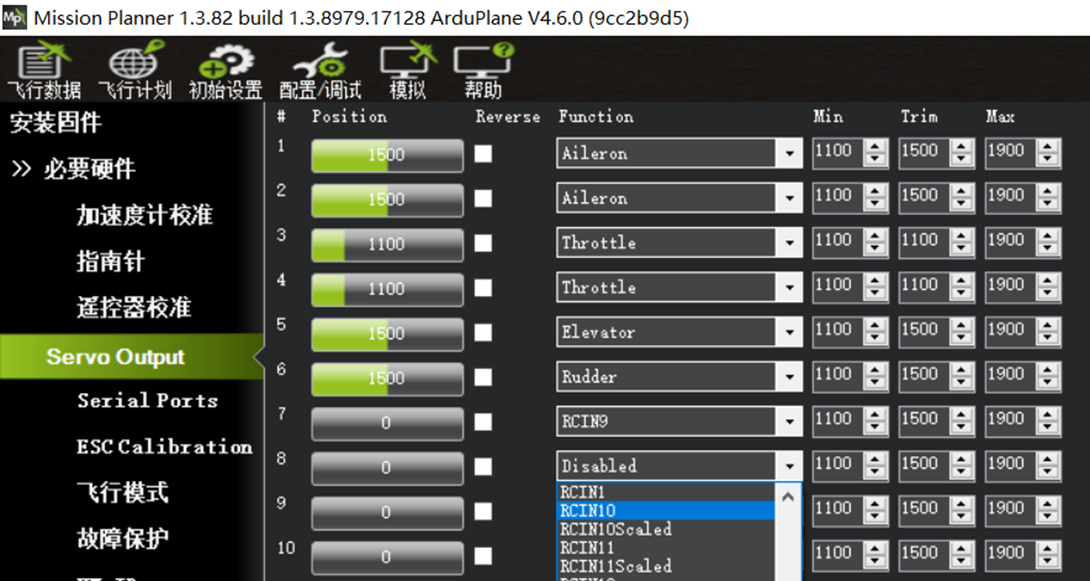
举例4:用户想在飞控的S8接一个舵机云台控制FPV摄像头的观察方向,使用遥控器的自定义旋钮开关的10通道来控制这个云台舵机,则可以把#8设置为RCIN10。