飞蛋AET-F405A-WING飞控 使用ArduPilot固件固定翼调参保姆教程
本文旨在针对新手玩家对Ardupilot调参逻辑的梳理,指导使用飞蛋AET F405A WING 固定翼飞控安装到一台固定翼FPV载机的调参设置全过程。
飞蛋AET F405A WING固定翼飞控,使用飞控+电源BEC板双层设计,使用STM32F405VGT6主控芯片,ICM42688加速计陀螺仪芯片,DPS310气压计芯片,内置OSD,板载蓝牙数传模块,
6路UART串口,10路PWM信号输出,1路SDA I2C并行外设接口,
板载舵机BEC 5V最高10A持续电流
5V BEC可持续4A输出,满足串口外设5V设备供电需求。
9V BEC持续2A输出,满足大功率图传发射供电需求。

目 录
第一章 飞控固件刷写 第3~8页
第二章 飞控接线 第9~14页
第三章 基础调参
第1节:地面站连接及重置默认参数 第15~18页
第2节:进行加速计校准及水平校准 第19~26页
第3节:指南针设置 第27页
第4节:舵机机电调自定义设置Servo Outputs 第28~32页
第5节:飞控串口定义设置 Serial Ports 第33~36页
第6节:遥控器校准 第37~39页
第7节:GPS模块连接正确检查 第40页
第8节:飞控朝向及姿态显示检查 第41~45页
第一章:飞控固件刷写
飞蛋AET F405A WING飞控,目前支持ArduPilot固件,INAV固件。本文重点讲解针对ArduPilot固件的固定翼调参设置,我们可以通过固件刷写升级到最新固件。
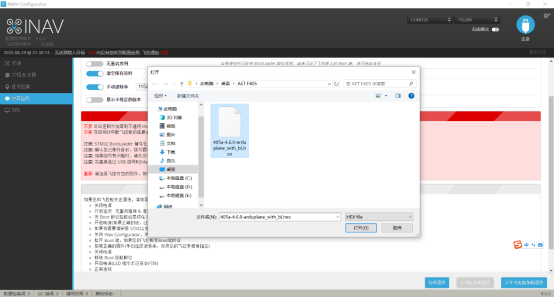
我们需要在飞蛋固件下载地址 https://download.aeroeggtech.com/ 下载厂家提供的 405a-4.6.0-arduplane_with_bl 即带bl引导的hex固件文件下载到电脑。

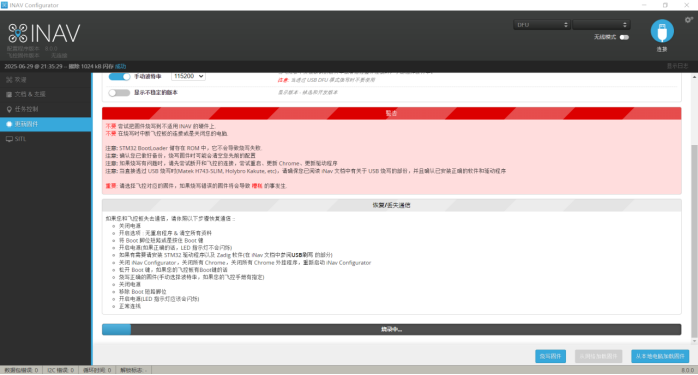
点击左侧“更新固件”—选择右下角“从本地电脑加载固件”—选择已经下载在电脑里的飞控固件。
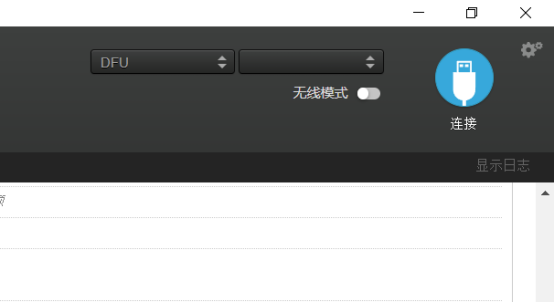
按住飞控的Boot按键不放,使用USB-TYPEC数据线把飞控与电脑连接,正常连接成功,INAV地面站右上角出现DFU表示,即可进入固件刷写。
部分玩家的电脑有可能因为驱动问题无法识别DFU模式,此时先在电脑系统的“设备管理器”查看“通用串行总线设备”—是否有“STM32 BOOTLOADER”设备。
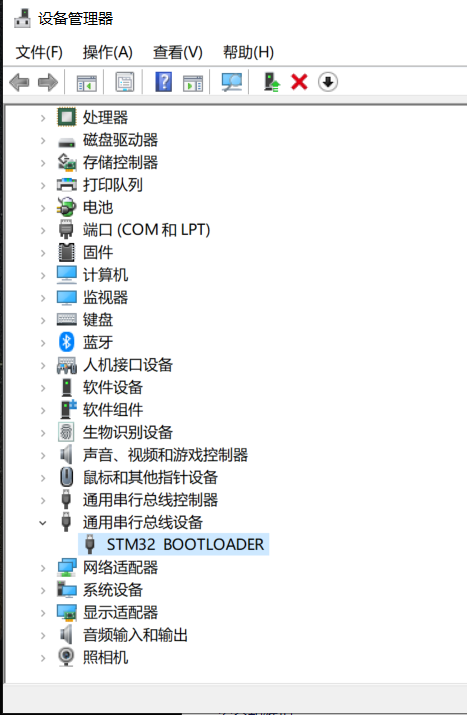
如果显示此设备有感叹号,则需要加载安装驱动程序。
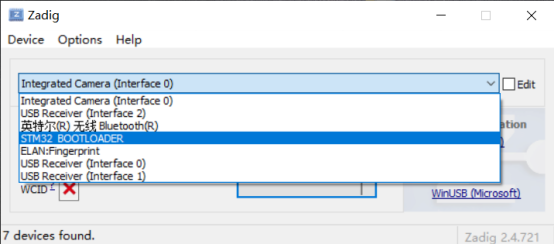
点击运行Zadig软件,点击Option,勾选下拉菜单第一项List All Devices
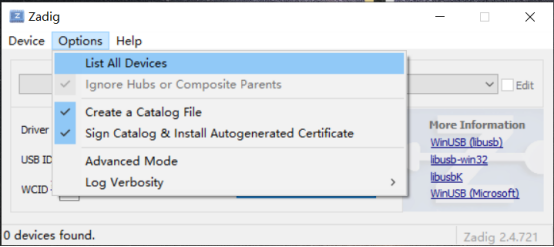
在主页面的下拉选项设备中选择 STM32 BOOTLOADER
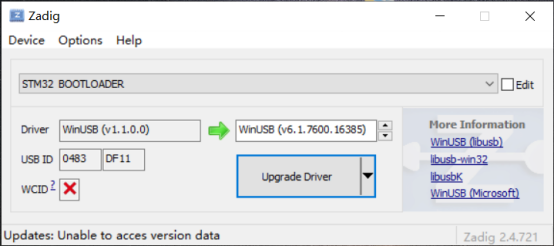
点击 Upgrade Driver 安装驱动
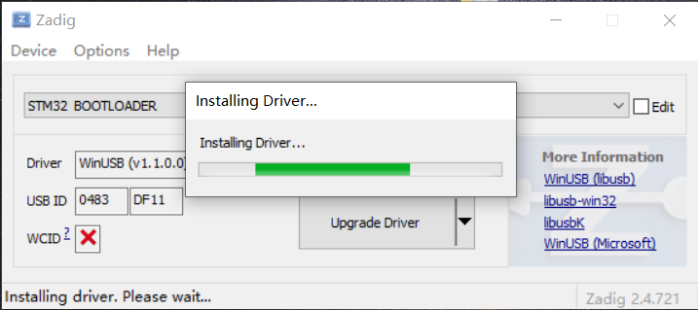
等待驱动安装。安装完成,断开飞控USB连接。重新按Boot键不放连接USB,即可正常识别DFU模式
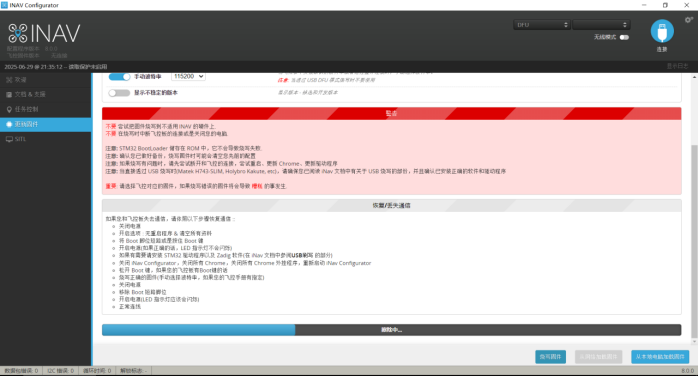
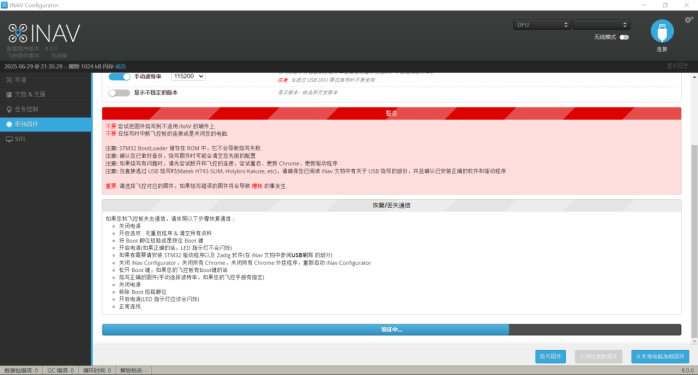
保持等待,地面站正常对飞控进行固件烧写
烧写完成,会自动进行验证。
显示 烧录成功,此时飞控固件写入完成。 关闭INAV地面站,飞控USB断开连接,重新插入连接电脑一次。
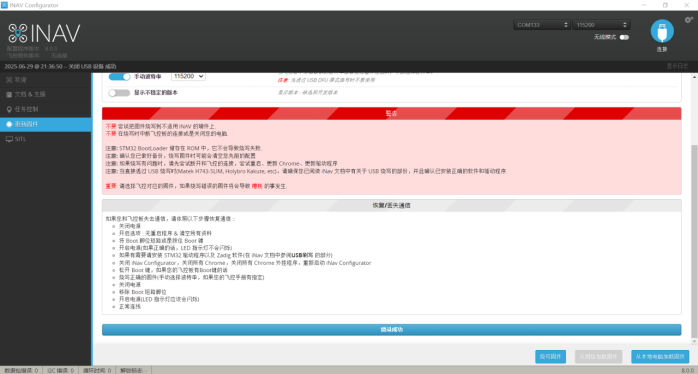
至此,我们已经完成对飞控固件的更新刷写。
注意:飞控固件烧写全过程,请断开所有串行总线外设连接。包含SBUS接收机,ELRS接收机,CRSF接收机,GPS模块,数字天空端,数传。
第二章:飞控接线
飞蛋AET F405A WING飞控接线图如下:
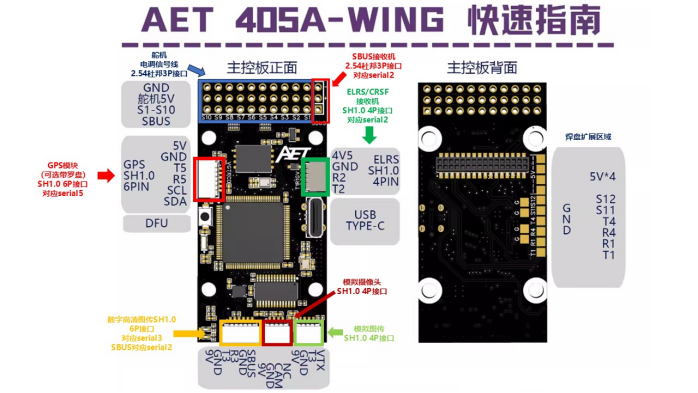
常见的外设有:GPS定位模块,SBUS接收机,ELRS接收机/黑羊CRSF接收机, 数字图传天空端(包括大疆O3、O4、Vista。蜗牛Caddx Avatar系列。开源高清图传OpenIPC) 空速计,电子罗盘等……
其中,GPS模块,SBUS接收机,ELRS接收机,黑羊CRSF接收机,数传模块,数字图传天空端为串口外设。 GPS模块的罗盘、模拟空速计 ,为i2c并行接口外设
有使用模拟空速计i2c并行设备的玩家,可以接到飞控的SDA SCL并口。详见本文第四章第12节。
串行总线接收机连接示范:
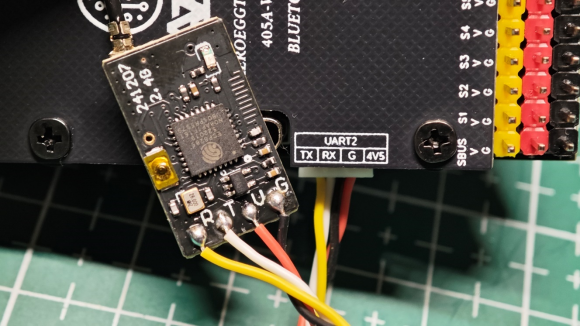
使用ELRS接收机,黑羊CRSF接收机,我们推荐与飞控的UART2端口连接,如上图。
接收机的R(或RX)连接飞控的TX,接收机的T(或TX)连接飞控的RX。
接收机的V(或5V)连接飞控的4V5,接收机的G(或GND)连接飞控的G。
连接后需要在地面站的Serial Ports页面进行相对应设置。
GPS模块(含电子罗盘)连接示范
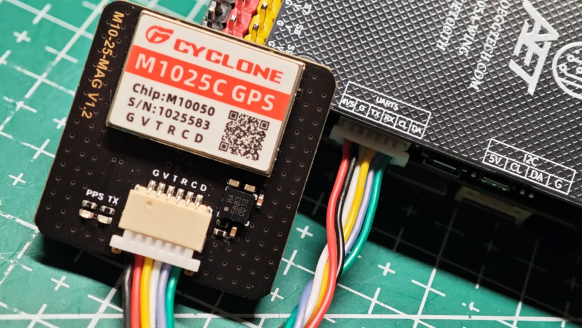
使用GPS模块,我们推荐与飞控的UART5端口连接,如上图。
GPS的R(或RX)连接飞控的TX,GPS的T(或TX)连接飞控的RX。
GPS的V(或5V)连接飞控的4V5,GPS的G(或GND)连接飞控的G。
GPS的C连接飞控的CL,GPS的D连接飞控的DA(CL、DA为并行总线i2c接口,接GPS带的电子罗盘。传统固定翼可不用选择安装电子罗盘。若GPS模块不带罗盘模块,CL、DA可无需连接)
连接后需要在地面站的Serial Ports页面进行相对应设置。
数字天空端连接示范
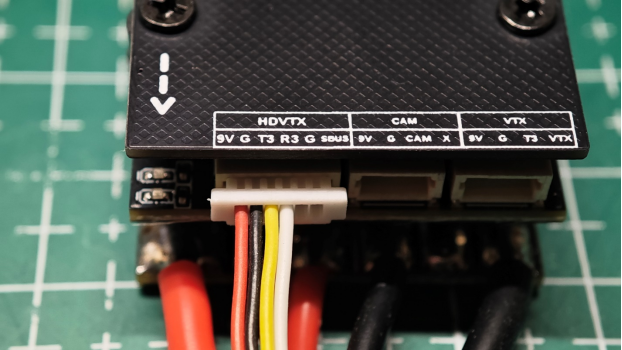
使用数字天空端,我们推荐与飞控的HDVTX接口(UART3端口)连接,如上图。
天空端的R(或RX)连接飞控的T3,天空端的T(或TX)连接飞控的R3。
天空端的V 连接飞控的9V,天空端的G(或GND)连接飞控的G。
由于大疆系列天空端内置与DJI FPV2遥控对频使用的SBUS接收机模块,不使用大疆FPV2遥控器的用户,请断开此端口排线SBUS线连接。
若使用DJI FPV2遥控器,请保持连接SBUS线。
连接后需要在地面站的Serial Ports页面进行相对应设置。
舵机连接示范

舵机接口一般为2.54杜邦3P接口,舵机线深色一般为G(GND)。红色或橙红色为5V舵机供电正极V,白色或橙黄色为舵机控制信号线S。对应连接飞控的S1~S10接口,飞控设置页面Servo Output的相关自定义设置。
电调信号线连接示范
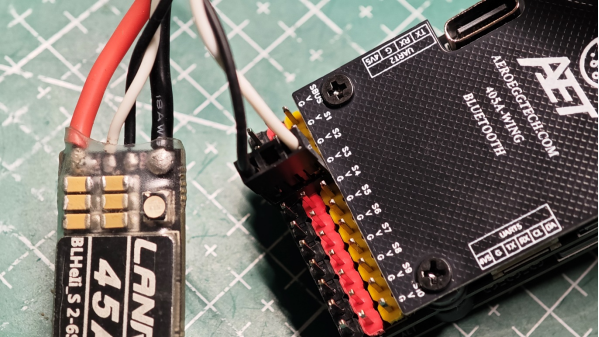
电调信号线接口一般为2.54杜邦3P接口,信号线深色一般为G(GND),对应连接飞控的S1~S10接口,浅色或白色为电调控制信号线S。部分带有内置BEC5V供电的电调,电调通电后信号线中间的5V电压输出容易与飞控内置的5V舵机供电BEC模块冲突,建议用户提前把此类电调信号线的5V线开,不要接入飞控。
对应飞控设置页面Servo Output的相关自定义设置。
第三章:基础调参:
第1节:地面站连接与重置默认参数。
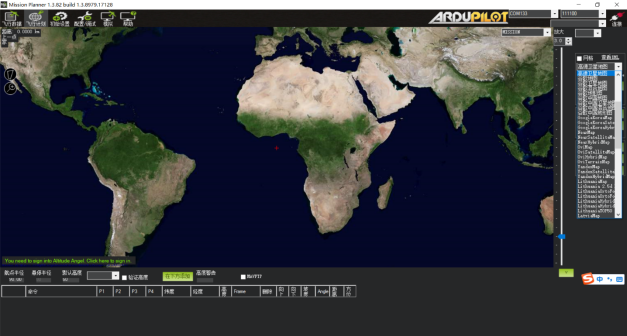
打开MissionPlanner调参软件。

玩家若无法加载实时卫星地图,地面站的“飞行任务”页面,右边选择地图源。一般建议选择“高德卫星地图”。选择后关闭地面站,点击运行MissionPlanner调参软件,此后地面站的地图源则在线调用“高德卫星地图”
使用Type-C数据线把飞控与电脑连接,在MP软件右上角选择飞控对应的端口,如下图:

点击连接,稍等几秒,软件在读取飞控的数据。
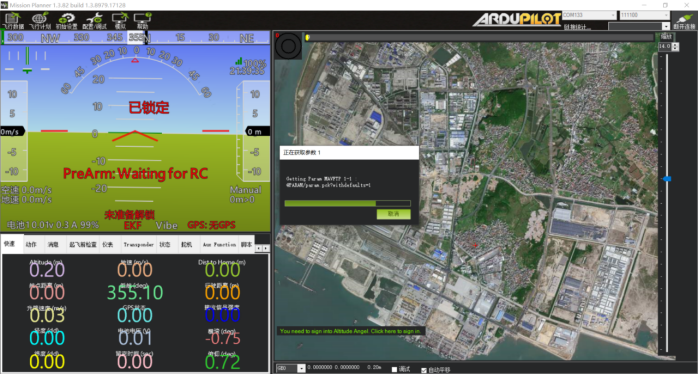
连接成功
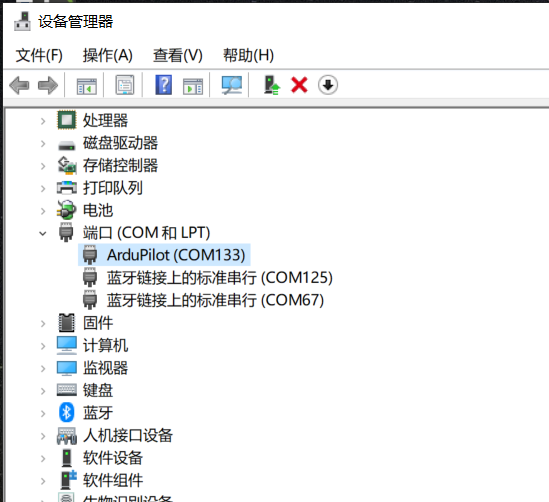
若连接USB后无法在端口下拉菜单中找到飞控选项。则需要检查电脑是否正确识别飞控驱动程序并分配端口。在电脑的设备管理器的端口栏进行查看。若没有分配端口号,则需要安装对应的驱动程序。
我们可以通过下图预览一下调参界面第一页概览

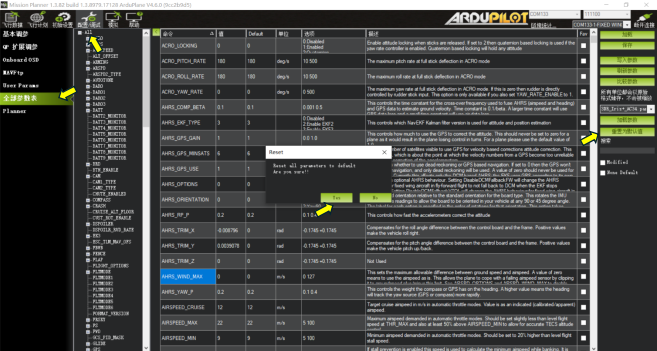
新固件刷写后,强烈建议先进行一次“重置默认参数”
操作为:“配置调试”--“全部参数表”--“重置默认参数”。
点击一次,地面站提示确认。点击yes即可。
第2节:进行加速度计校准及水平校准
点击初始设置,加速计校准,
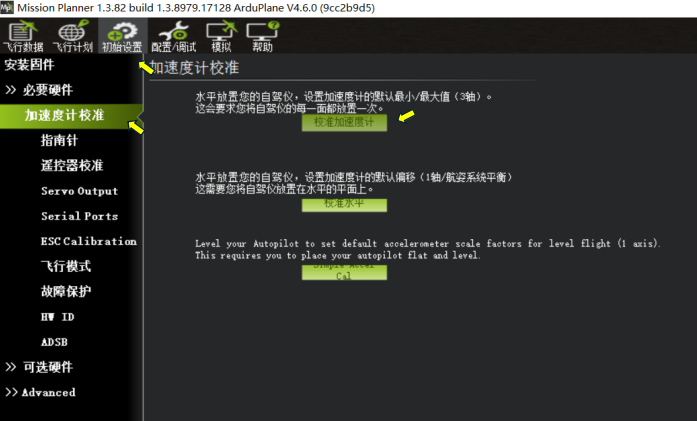
点击校准加速度计,根据软件提示,翻转飞控的六面,点击“校准加速度计”,依据提示对飞控的6个面进行校准。如下图
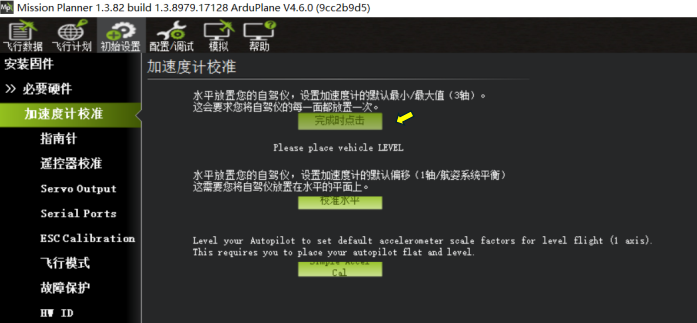
Please place vehicle LEVEL加速计校准--底面朝下,如下图
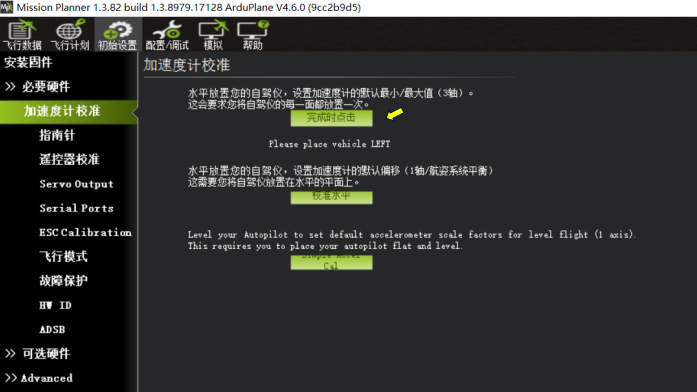
Please place vehicle LEFT加速计校准--左面朝下, 如下图
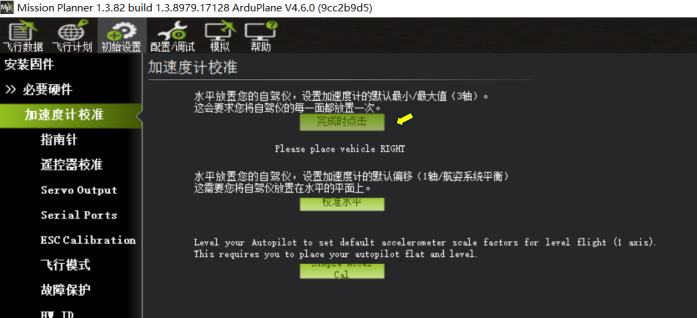
Please place vehicle RIGHT加速计校准--右面朝下
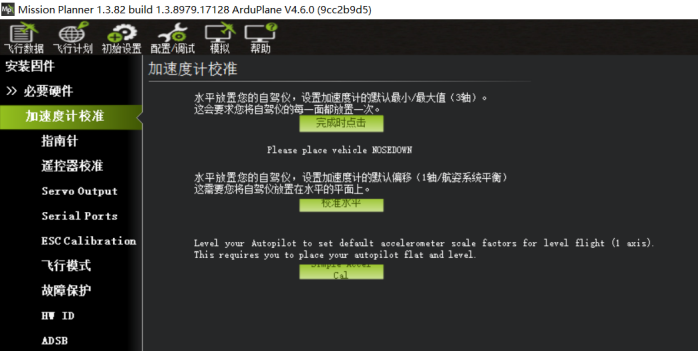
Please place vehicle NOSEDOWN加速计校准--前面朝下
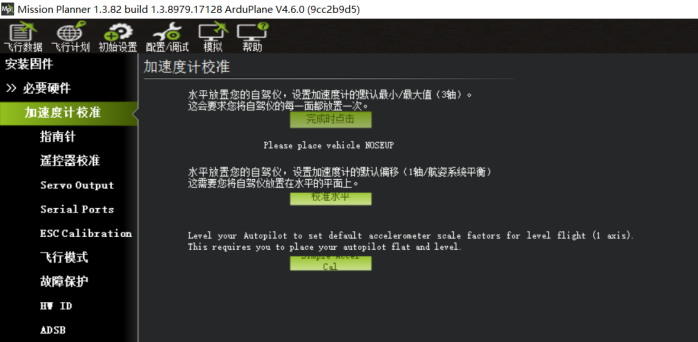
Please place vehicle NOSEUP加速计校准--后面朝下

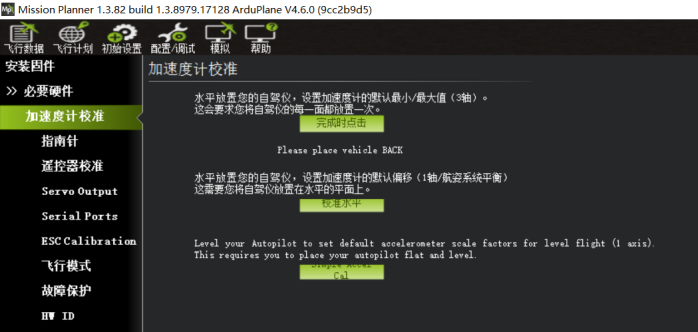
Please place vehicle BACK加速计校准--顶面朝下
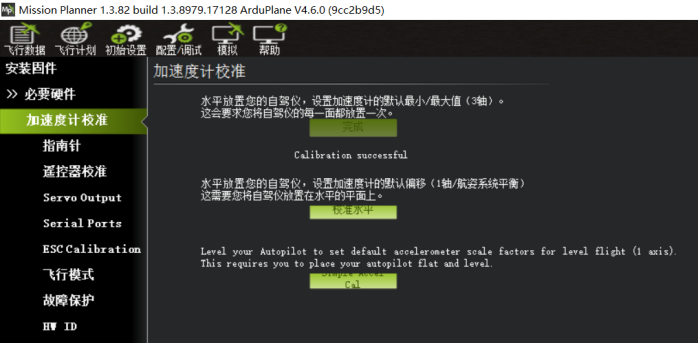
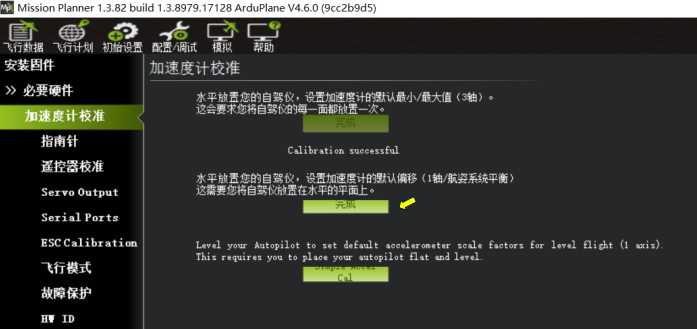
校准完成
校准水平,可以在飞控装机后,飞机平放,然后执行一次校准水平即可。
第3节:指南针设置。
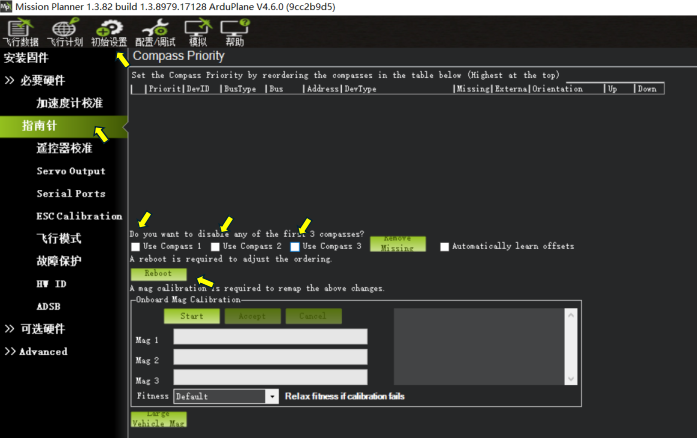
固定翼基础使用过程中,指南针(电子罗盘)非必须安装。
我们可以关闭飞控预开启的指南针选项。
在初始设置—指南针 页面,
取消勾选:Use Compass1,Use Compass2,Use Compass3
点击Reboot 重启飞控。
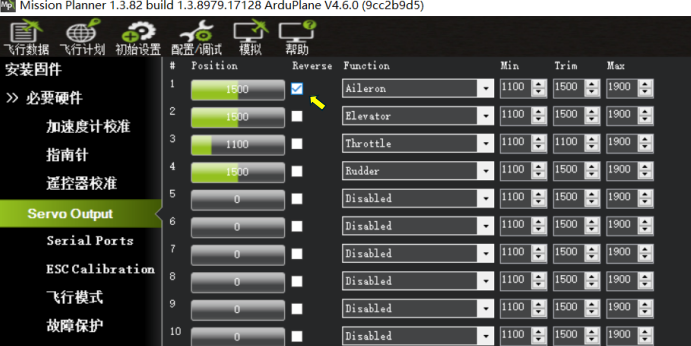
第4节,舵机机电调自定义设置Servo Outputs

Ardupilot固件对飞控的S1~S10的输出支持完全自定义,
上图对应的#1即为飞控的S1,#2即为飞控的S2,以此类推。
默认参数为常规布局的AETR模式,如上图
Aileron 为副翼横滚舵机
Elevator为俯仰升降尾舵机
Throttle为电调油门信号
Rudder为垂直方向舵机
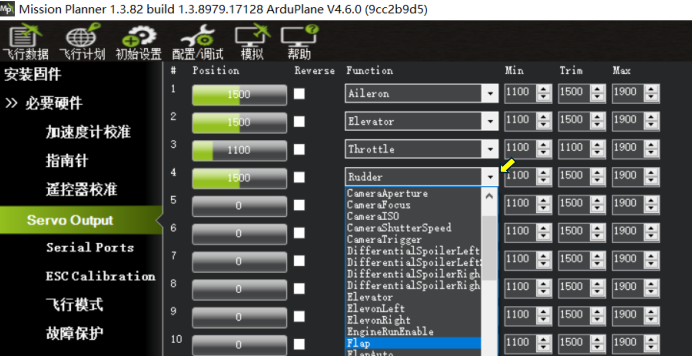
每个Servo输出通道都可以在对应的下拉菜单中选择定义,这是Ardupilot固件最有特点的地方之一。修改Servo的自定义设置,需要重启飞控才能生效。 我们常见的定义类型如下:
Aileron 为副翼横滚舵机
Elevator为俯仰升降尾舵机
Throttle为电调油门信号
Rudder为垂直方向舵机
ElevonLeft 飞翼左舵机(副翼升降混控)
ElevonRight 飞翼右舵机(副翼升降混控)
ThrottleLeft 双发差动左电机电调油门信号
ThrottleRight 双发差动右电机电调油门信号
VTailLeft V尾左舵机(升降方向舵混控)
VTailRight V尾右舵机(升降方向舵混控)
Ardupilot的通道输出为实时输出,后期进行通道辅助修正调整的时候,发现飞控执行飞机姿态修正的时候,通道输出方向错误,在对应通道的"Reverse"处勾选,对应通道的输出即可反向。
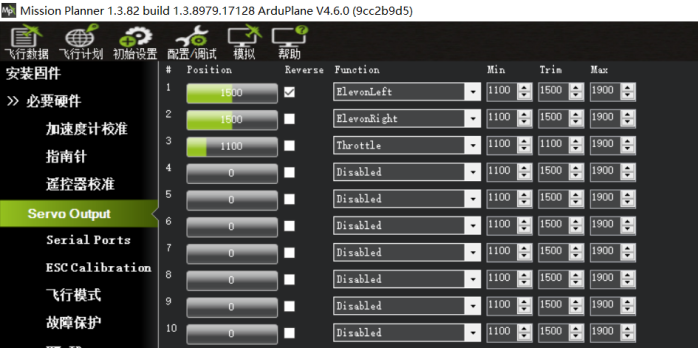
举例1:用户装一台单发尾推飞翼(ARWING,自由者等),选择S1接飞翼左舵机,则#1设置为ElevonLeft,在装机调试过程中发现该舵机输出方向反,则勾选#1的Reverse使该舵机输出动作反向。选择S3接电调信号线,则#3设置为Throttle。

举例2:用户装一台3D打印飞机的双发V尾机型,使用双电机差动控制。副翼2个舵机接在S1,S2。则#1、#2都可以设置为Aileron。S3接左边机翼的电调信号,则#3设置为ThrottleLeft。S4接右边机翼电调信号,则#4设置为ThroleLeft。S5接V尾的左舵机,#5设置为VTailLeft,S6接V尾的右舵机,则#6设置为VTatlRight。

举例3:用户装一台大白鲨(肥翁),典型的传统翼型布局双发动力,不想使用双发差动控制。副翼2个舵机接在S1,S2。则#1、#2都可以设置为Aileron。S3/S4可任意选择接两边机翼的电调信号,则#3#4设置为Throttle。S5接平尾的升降舵机,#5设置为Elevator,S6接尾的垂直尾翼方向舵机,则#6设置为Rudder。
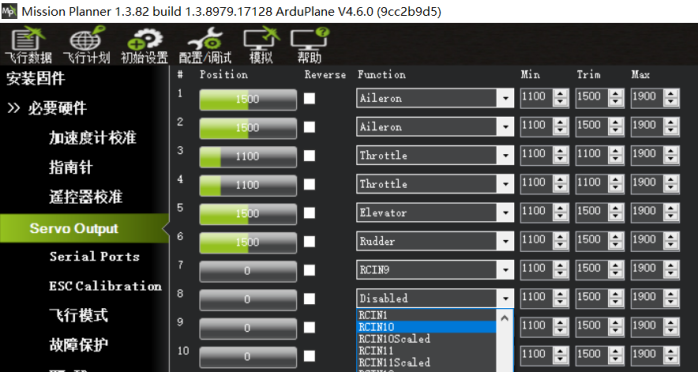
举例4:用户想在飞控的S8接一个舵机云台控制FPV摄像头的观察方向,使用遥控器的自定义旋钮开关的10通道来控制这个云台舵机,则可以把#8设置为RCIN10。
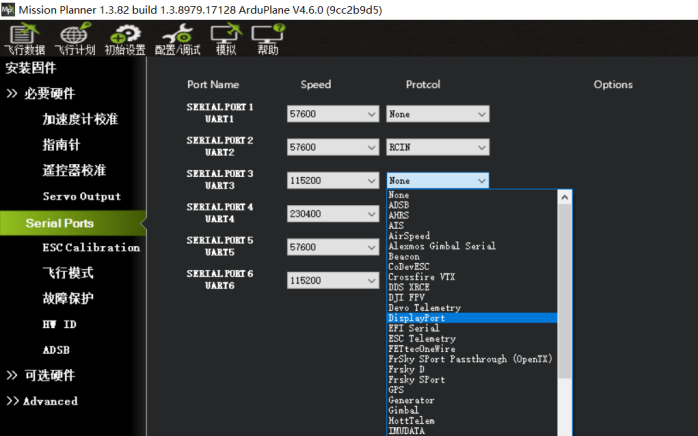
第5节,飞控串口定义设置 Serial Ports
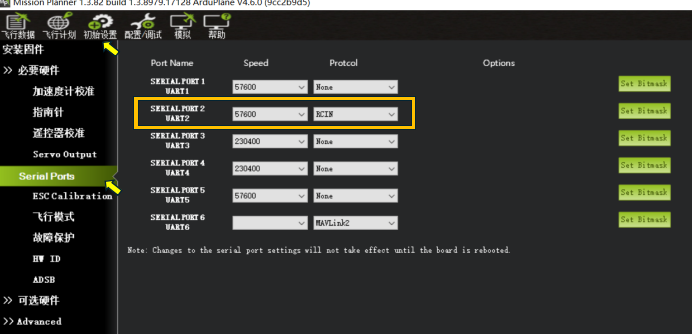
用户需要对连接飞控的串行总线接口外设进行定义。
飞控的默认参数如上图,第一列Port Name指的是对应串口的名字, 例如SERIAL PORT2指的就是串口2(即UART2)。Speed列为对应接口设置的波特率值。
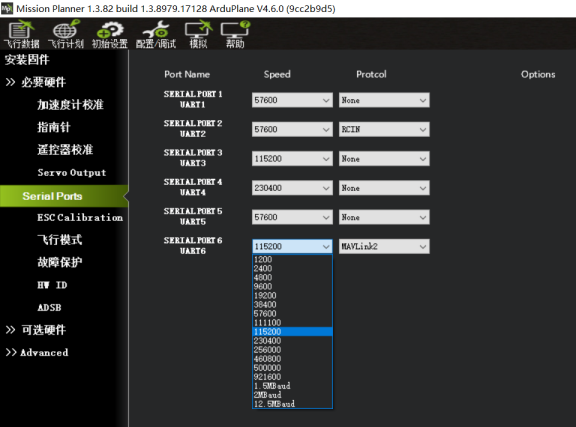
Protcol列为对应接口的定义类型。我们根据不同的串口外设设置不一样的Speed值及Protcol类型
接收机设置:
如果使用SBUS接收机(例如天地飞wbus,乐迪系列,Futaba系列接收机等),直接使用2.54杜邦3P头接到飞控的SBUS口。SBUS口对应SERIAL PORT2(即UART2),此时飞控的默认参数 57600 RCIN就直接自动识别SBUS接收机信号。
如果使用ELRS/CRSF接收机,接收机需要使用sh1.0 4P接口 接入飞控侧面UART2接口,(接线图参考本教程第10页)。此类接收机的参数一般为115200 RCIN。
飞控固件已经不支持PPM信号接收机,以及PWM信号接收机。
GPS模块设置:
GPS需要使用Sh1.0 6P接口 接入飞控侧面UART5接口,(接线图参考本教程第11页)。多数GPS的参数一般为38400 GPS。
部分GPS模块的Speed波特率值可以到115200。
数字图传天空端设置:
数字图传天空端需要使用Sh1.0 6P接口 接入飞控前面HDVTX接口,对应UART3接口(接线图参考本教程第12页)。数字图传天空端参数一般为115200 DispiayPort。
(包含大疆G2,G3,N3眼镜能配对使用的大疆天空端。蜗牛Caddx Avatar系列天空端,开源高清图传OpenIPC)
使用大疆V1、V2眼镜对应大疆老款天空端及Vista,则对应UART3接口的Protcol值选择DJI FPV。
飞控板载蓝牙数传模块设置
AET F405A WING飞控板载蓝牙数传模块,直接对应UART6接口。
则该接口的参数选择 115200 Mavlink2
外置数传模块设置
外置数传模块推荐连接飞控板背面的TX1 RX1焊接点,对应UART1接口
常用数传的参数一般为: 115200 Mavlink2
常用外设接口推荐设置如下图
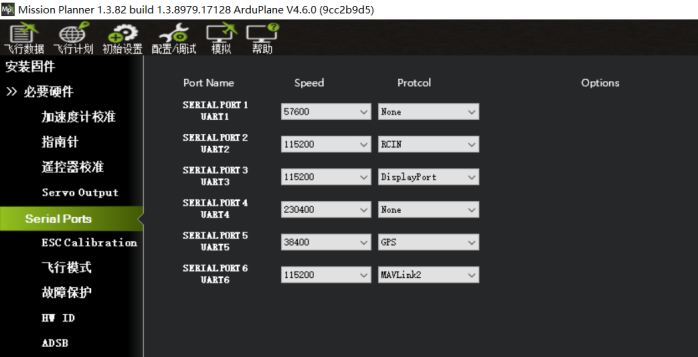
UART2接口连接ELRS接收机, UART3接口连接数字高清天空端, UART5接口连接GPS模块, 保留飞控板载蓝牙数传模块对应UART6。
设置好所有串口外设,并连线正确,此时接收机,GPS模块已经与飞控正确连接并完成设置,我们可以通过以下步骤检查遥控信号通过接收机接入飞控,以及GPS模块连接飞控工作正常。
第6节,遥控器校准
如果遥控器开机,接收机与遥控器正常对频,但是接收机与飞控的连接不正确或者对应串口设置不正确,在遥控器校准页面则看不到Thrttle油门信号、以及5~16通道的通道信号值。如下图所示
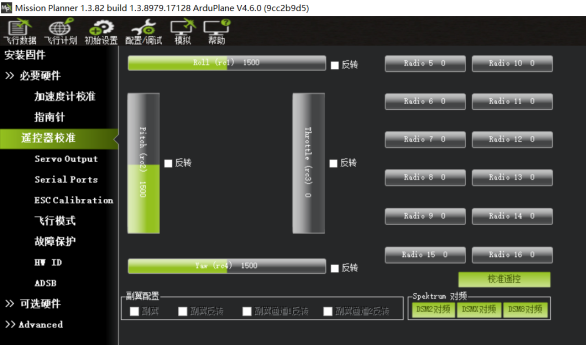
接收机与飞控连线正确且对应的串口设置正确,则可以看到所有通道有绿色滑块值。
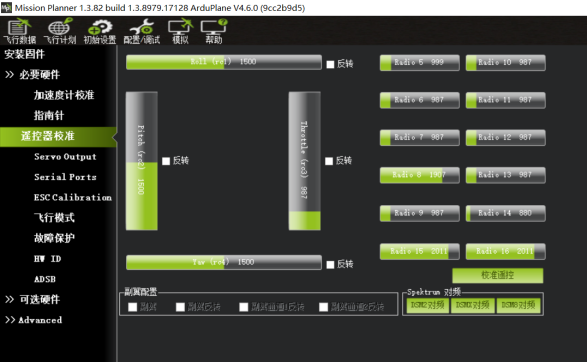
此时我们开始对遥控器的摇杆及其他开关通道进行校准。
点击“校准遥控”弹出对话框”Ensure your transmitter is on and receiver is powered and connected。Ensure your motor does not have power/no props!!!”旨在提示请确认遥控器油门通道的方向,以及确保电机未接电及未安装螺旋桨。点击OK。如下图:

弹出对话框“Click OK and move all RC sticks and switches to their extreme positions so the red bars hit the limite”旨在提示点击该OK栏后,注意将所有通道的遥感打满,开关通道及6端开关通道打满,确保看到通道显示红色栏为通道输出的最大值及最小值。 点击OK。如下图:

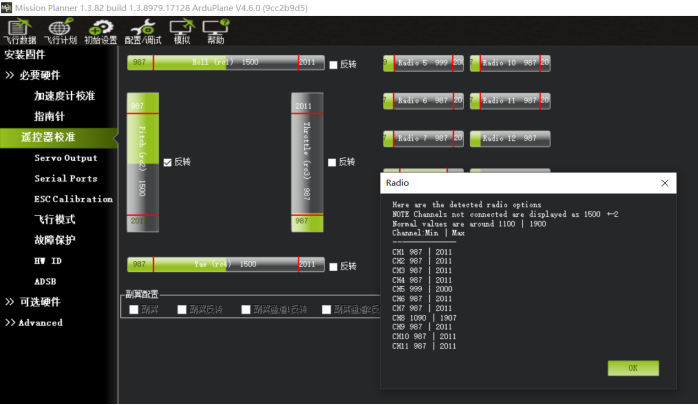
此时将所有通道的摇杆打满,开关通道及6端开关通道打满,可以在画面中开到通道是输出最大值和最小值有红色栏进行圈定,(Ardupilot固件的特点,建议勾选Pitch rc2 反转)点击“完成时点击”。如下图

点击OK后,弹出对话框,显示各个通道输入的最大值与最小值,点击OK。如下图:
此时我们完成遥控器校准步骤
第7节:GPS模块连接正确检查
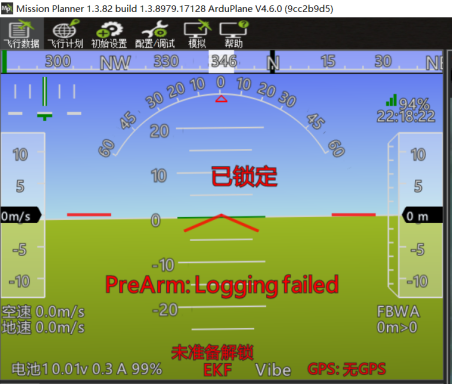
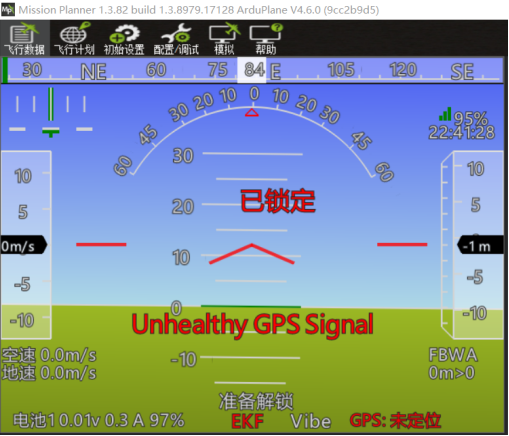
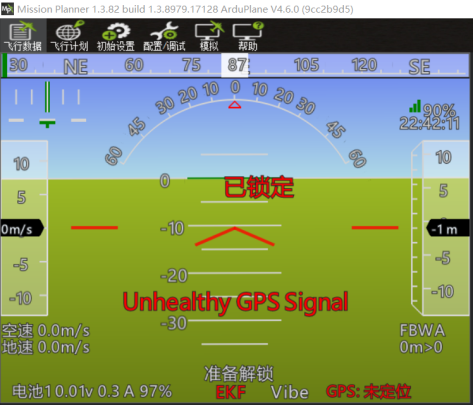
GPS连接正确,串口设置正确,工作正常,我们在地面站首页姿态仪框右下角, 可以看到”GPS未定位“红色字样。在室外完成搜星定位,则显示 GPS:3D定位 白色字样
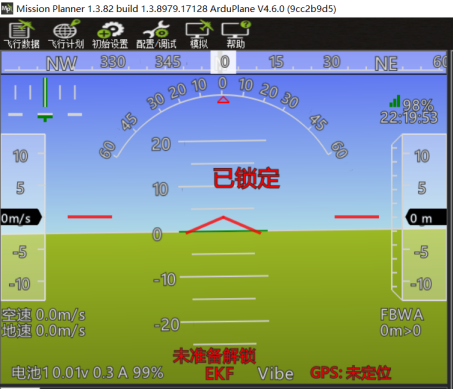
如果GPS连线错误,串口设置错误,或者GPS本身兼容性问题或者质量问题。飞控无法正确识别GPS,姿态仪框右下角则显示: GPS: 无GPS 红色字样。
8节:飞控朝向及姿态显示检查
Ardupilot固件的姿态仪框,可以理解为用户坐在驾驶舱内的第一视角,而不是第三方视角。
上半部分蓝色区域为模拟天空部分,下半部分绿色区域为模拟地面部分,天空与地面连接线为地平线。
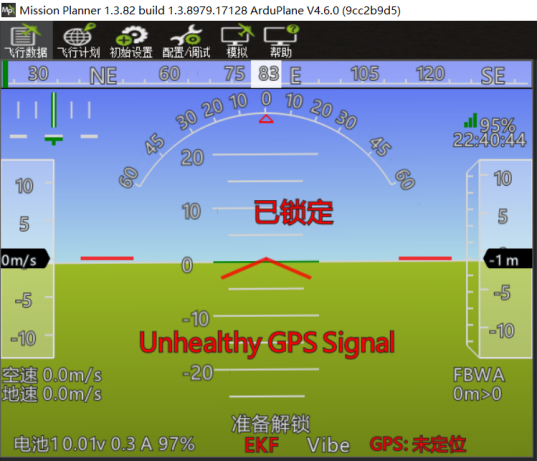
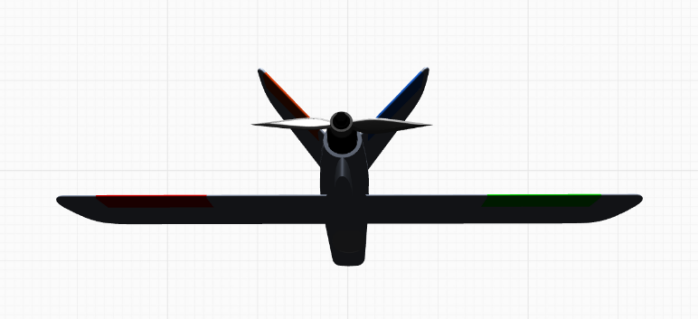
此时飞机或飞控的姿态为水平姿态,如下图,标准检查视角为飞机的对尾视角。
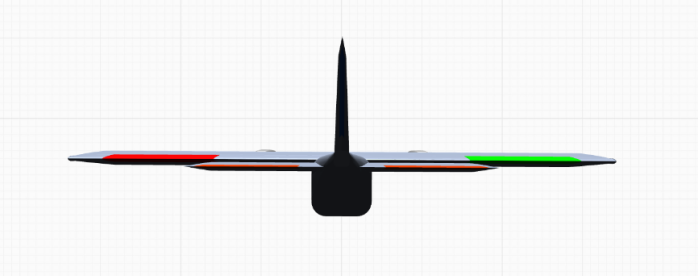
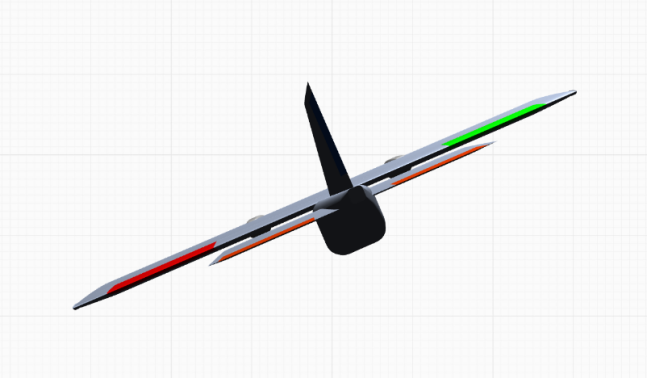
当飞机(或飞控)抬头,蓝色天空占多数,绿色地面占少数。姿态框显示如下:
此时飞机的正确姿态应该为:
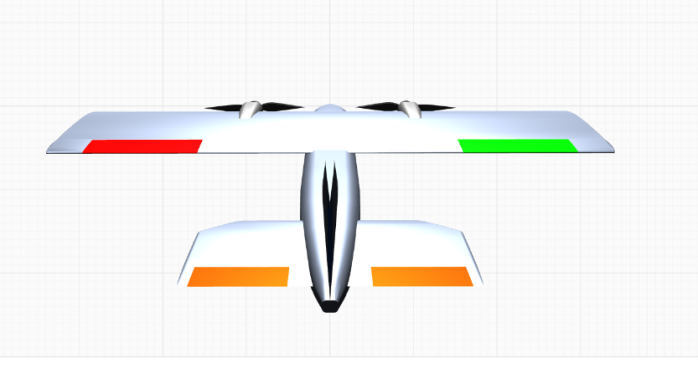
当飞机(或飞控)底头,蓝色天空占少数,绿色地面占多数。姿态框显示如下:
此时飞机的正确姿态应该为:
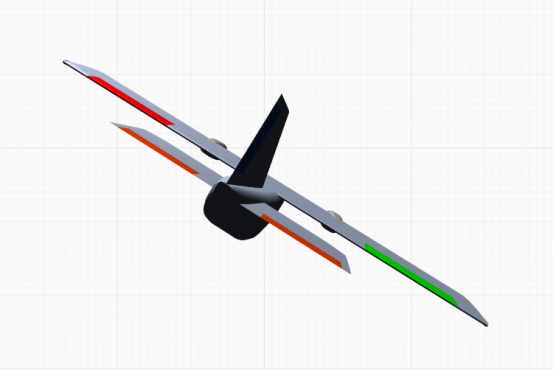
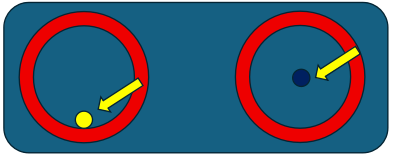
当飞机(或飞控)左倾,特别注意,用户可以闭上眼睛模拟一下自己坐在驾驶舱里左倾,驾驶窗看到的天空与地平线的变化。此时正确的姿态框显示如下:

此时从第三方视角看到的飞机姿态应该为:
当飞机(或飞控)右倾,特别注意,用户可以闭上眼睛模拟一下自己坐在驾驶舱里左倾,驾驶窗看到的天空与地平线的变化。此时正确的姿态框显示如下:

此时从第三方视角看到的飞机姿态应该为:
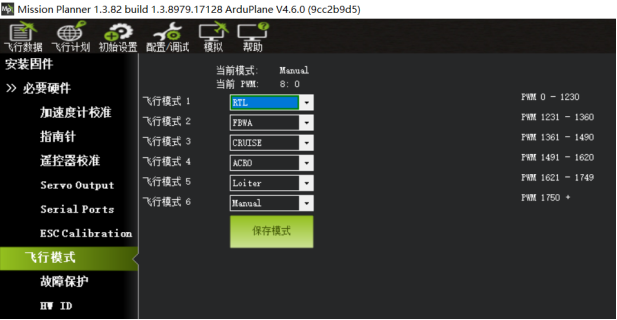
第9节,飞行模式设置
Ardupilot使用1个比例通道进行6个模式切换(默认设置为遥控器的8通道)下图为模式切换通道预设的默认值

我们可以通过对应的飞行模式右边的下拉箭头选择用户所需的常用飞行模式

各种常用模式的特点:
MANUAL 手动模式,完全脱离飞控参与
CIRCLE 盘旋模式
STABILIZE 自稳模式。简单的自稳模式,只会控制飞机回中,保持水平,可以用遥控控制姿态。如果觉得FBWA模式动作太过迟缓可以开启这个模式。
FBWA 增稳模式。根据设置倾角和俯仰角,并很好的保持姿态,高度通过油门控制,推荐新手使用的模式。
FBWB 增稳定高模式。在FBWA基础上会很好的保持高度。
CRUISE 巡航模式。定高定向飞行(远航强烈推荐使用)
ACRO 姿态锁定模式,类似于穿越机的手动模式,松杆后锁定姿态。
AUTOTUNE 自动调参模式
AUTO 自动航点模式
LOITER 留待模式。即在当前定位点上空以设置的高度和半径绕圈等待。
RTL 返航模式。自动直线返航到家的位置上空以设置的高度和半径盘旋
TAKEOFF 辅助抛飞模式
根据众多模友的一致推荐选择,固定翼推荐大家使用以下模式设置 (确保遥控6段开关模式切换正常)
六段开关推荐设置模式:
1,RTL返航模式。
2,FBWA增稳模式。
3,CRUISE巡航模式。
4,ACRO姿态锁定模式。
5,LOITER留待模式。
6,MANUAL 手动模式
目前市场上有遥控原带6段开关(例如Jumper T16,T18,Radiomaster TX16S等),不过这个六段开关的输出范围与Ardupilot的6个模式的范围区间不太一致,建议在遥控的6段比例通道中加入一个曲线,参数为:
6段开关曲线设置
-100 -60 -20 20 60 100
-85 -45 -15 15 45 85
部分开源EDGETX系统的遥控带6段开关,但这6个按键开关在遥控中属于独立6个按键(Radiomaster GX12、BOXER。Jumper Tpro、T20S、T15,小蜜蜂)。需要在遥控器的MIXER页对CH8进行混控设置,具体设置请参考对应遥控的使用视频教程。
部分遥控没有6段开关(如Frsky X9D, Jumper Tlite,radiomaster TX12,Zorro) 推荐使用3段开关对应控制3个常用飞行模式,再使用数个2/3段开关作为独立模式激活功能
Ardupilot的模式切换确认逻辑为以最后一次模式切入为确认。
独立通道开关切换模式
使用举例: 我们使用遥控的8通道(飞控默认)3段开关作为模式切换,在设置的时候需要对照选择开关段位对应的模式位置 分别选择:FBWA增稳模式,CRUISE定高定向模式,LOTIER定点留待模式

使用遥控5通道的2段开关作为TAKEOFF抛飞模式开关
使用遥控6通道的2段开关作为RTL返航模式开关
独立通道开关控制独立模式设置,详见第66页
第10节:自稳辅助舵面反馈检查,遥控器打杆舵面反馈检查
此步骤需在把飞控,舵机均安装在机身上,且舵面与舵机连接安装完成,才能完成检查
遥控器摇杆模式
左手油门(美国手)
即左摇杆上下为油门通道,左右为方向通道,
右摇杆上下为俯仰升降通道,左右为横滚副翼通道

右手油门(日本手)
即左摇杆上下为俯仰升降通道,左右为方向通道,
右摇杆上下为油门通道,左右为横滚副翼通道

本教程主要以左手油门(美国手)作为讲解
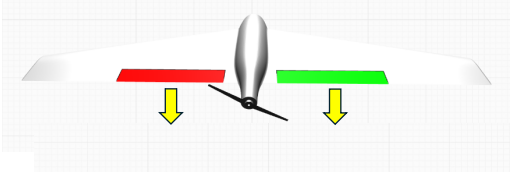
自稳模式舵面辅助方向检查(非常重要)
建议切换飞控的模式为FBWA增稳模式
左边摇杆最低且左右居中,右边摇杆居中 (美国手)
此时把飞机拿起,做与下图同样动作,观察舵面作出的辅助修正动作反馈为 常规布局飞机抬头
飞翼布局飞机抬头
V尾布局飞机抬头
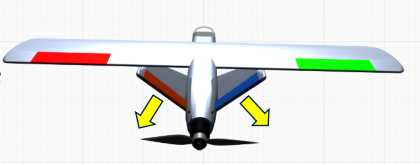
常规布局飞机低头
飞翼布局飞机低头
V尾布局飞机低头
常规布局飞机左转
飞翼布局飞机左转
V尾布局飞机左转
常规布局飞机右转
飞翼布局飞机右转
V尾布局飞机右转
若舵面修正的方向有误,在地面站Servo Output页面,对应通道的Reverse栏勾选反向。直至所有舵面辅助修正方向正确。(详见第30页)
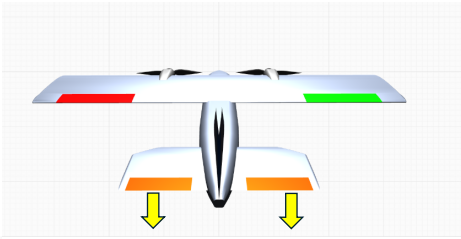
遥控器打杆舵面检查,建议切换飞控的模式为Manual手动模式 右边摇杆拉到最低位置
此时飞机舵面应作出的动作反馈为 常规布局
飞翼布局
V尾布局
右边摇杆拉到最上位置
此时飞机舵面应作出的动作反馈为
常规布局
飞翼布局
V尾布局
右边摇杆拉到最左位置
此时飞机舵面应作出的动作反馈为
常规布局
飞翼布局
V尾布局
右边摇杆拉到最右位置
此时飞机舵面应作出的动作反馈为
常规布局
飞翼布局
V尾布局
若飞机舵面在手动模式下舵面反馈方向错误,在“遥控器校准”界面,选择对应的摇杆通道,勾选对应通道的“反转”选项即可。(详见第37页)
第四章 全部参数表 其他参数更多是在“全部参数表”里面进行针对性设置,这是ardupilot固件最具有特点地方。
部分安装了MissionPlanner调参软件的用户在软件界面中找不到“全部参数表”项目,可以在“配置/调试”页面下的“Planner”页面下的“布局”项目,选择“Advanecd”,然后保存,关闭软件,重新打开并连接飞控,即可找到“全部参数表”项目页。如下图
使用全部参数表,建议在电脑同步打开调参手稿TXT文件
直接复制手稿里的关键参数名字,粘贴到全部参数表右侧的“搜索”框里,主页面会自动刷新出对应的参数的当前值,以及该参数的单位、选项、阐述(全英文,可复制到翻译软件或者AI进行解释)。我们需要修改的是对应参数的“值”这列。输入修改的参数值后,点击右侧“写入参数”,部分命令会弹出对话框,关闭或者忽略即可,弹出“Parameters successfully saved”对话框,点击OK即可。此时你要修改的命令的值已经完成更新。 部分参数生效需要重启飞控。
第1节 解锁自检ARMING_CHECK 及上锁ARMING_RUDDER Ardupilot固件对飞控解锁要求非常高,默认参数需要自检数十项参数后达标才允许解锁,非常麻烦。(搜索ARMING)
ARMING_CHECK 0 (此处会弹出对话框,关闭即可) 解锁自检,忽略所有要求。非自动油门模式下(FBWA模式,Manual模式)可以在油门最低,Yaw方向舵右打满6秒后,飞控解锁,推油门电机转。 有自动控制油门的模式(RTL模式,CRUISE模式,Lotier模式等)无法解锁 若用户需要固件对部分重要功能进行自检确认,可根据自身实际情况勾选 Compass 罗盘模块 4 Barometer 气压计模块 2 GPS Lock GPS定位锁定 8 RC Channels 遥控器通道信号输入 64 举例:若想希望飞控在GPS搜星定位完成,并确保飞控气压计无异常,可选择填入 10 (即8+2) ,写入保存即可。
设置参数 ARMING_RUDDER 2 飞机落地后,Yaw方向舵左打满6秒,飞控锁定,此时推油门电机不转。
第2节,设置图传OSD相关参数
OSD_TYPE 此参数主要适应图传的OSD显示模式, 常见的模拟5.8G图传,该参数保持默认1即可 使用MSP_Displayport模式的数字图传(大疆G2/G3/N3眼镜适配的天空端、蜗牛Avatar系列天空端、开源OpenIPC数字高清天空端),该参数设置为 5 使用老款大疆高清眼镜V1/V2对应Vista及原厂双天线天空端,该参数设置为 3
MSP_OPTIONS 4 使用大疆G2/G3/N3眼镜适配的天空端,需要设置该参数
OSD_OPTION 32 使用大疆G2/G3/N3眼镜适配的天空端,需要设置该参数。 使用Openipc开源数字天空端,该参数为 42
OSD1_TXT_RES 1 此参数主要为调整OSD显示的分辨率布局,高清图传均建议设置
第3节,修改默认6段模式切换的通道 FLTMODE_CH 固件默认8通道作为飞控模式切换通道,只需要在遥控设置8通道为6段开关用于模式切换。使用ELRS接收机,请使用ELRS3.X及以上固件版本,100hzFull模式或者333HzFull模式 ,该参数可保留默认8 ,即使用8通道作为模式切换) 如需要修改使用其他通道作为6段模式切换通道,例如使用12通道作为模式切换,FLTMODE_CH 12 选择12通道作为模式切换通道(将12通道设置位6端模式开关)
第4节,修改FBWA模式下最大允许姿态角度值
ROLL_LIMIT_DEG 60 FBWA模式下横滚最大比例角度 默认45 。建议修改至60,修改此项,降低FBWA模式下横滚转弯的半径
PTCH_LIM_MAX_DEG 35 FBWA模式下俯仰最大比例角度
默认20 建议修改至35,修改此项,降低FBWA模式下爬升倾角,提高爬升速率
FBWB_CLIMB_RATE 4 110m/s CRUISE 定高定向模式是远航常用的飞行模式,默认参数中允许玩家爬升的速率比较低,仅2M/s,玩家可根据飞机动力搭配的特点,适当修改此参数。在执行定高定向模式时,遥控输出俯仰拉升动作,飞机能根据设定的爬升速率进行快速爬升。推荐510m/s。参数如下
第5节,调整使用混控机型的舵面允许角度 MIXING
安装飞翼机型(使用副翼升降混控)、V尾机型(使用升降方向混控)。飞控默认参数允许的舵面动作比较小。可以通过修改MIXING_GAIN参数的值增大舵面动作量。默认0.5。可以适当调整为0.8或 1。
第6节,独立通道开关切换模式(搭配第49页) 用户可以使用独立的遥控通道开关单独设置一个模式控制。每一个常用的模式都有对应的参数值。如下:
4 : ModeRTL 返航模式 16 : ModeAuto 航点模式 51 : ModeManual 手动模式 56 : ModeLoiter 定点留待模式 58 : Clear Waypoints 航点清除 72 : ModeCircle 盘旋模式 77 : ModeTakeoff 抛飞模式 92 : FBWA 增稳模式 150 : CRUISE 定高定向模式 153 : ArmDisarm开关一键解锁 举例: 使用遥控5通道的2段开关作为TAKEOFF抛飞模式开关,全部参数表中查找 RC5_OPTION 选择 77
使用遥控6通道的2段开关作为RTL返航模式开关 全部参数表中查找 RC6_OPTION 选择 4
使用遥控7通道的2段开关作为Manual手动模式开关 全部参数表中查找 RC6_OPTION 选择 51
第7节,TAKEOFF抛飞模式相关参数设置 TK TAKEOFF抛飞模式是FPV手抛试载机非常实用的起飞模式。在设定对应的模式开关切入后,我们可以针对性的修改抛飞模式中的一些参数。
建议修改参数: TKOFF_ALT 100 (设置起飞模式目标到达指定高度100米) TKOFF_DIST 300 (设置起飞模式最大范围 300米) TKOFF_LVL_ALT 50 (抛飞后到达第一阶段高度机翼保持水平,默认20) TKOFF_LVL_PITCH 20 (设置起飞模式最大爬升角度 20°) TKOFF_THR_MAX 100 (设置起飞模式最大油门值100%) TKOFF_THR_MINACC 3 (起飞模式飞控检测飞机瞬间速度达到3米/秒,油门输出) TAKEOFF模式必须在有GPS定位成功,且确保飞控解锁成功后才能启用。
第8节,失控保护相关参数设置 FS(非常重要)
Ardupilot固件的失控保护逻辑,为飞控未检测到接收机给飞控输出的油门值低于1000,飞控则执行失控保护动作(熟悉inav或者bf的玩家应该清楚,遥控未与接收机连接,或者飞控未检测到接收机,油门值会固定在885),飞控默认固件在失控保护比较保守,所以建议用户执行一次失控保护检查。如下图:(搜索FS)
FS_SHORT_TIMEOUT 1.5 (失去接收机油门输出信号1.5秒后,飞控执行第一阶段失控保护动作) FS_SHORT_ACTN 1 (第一阶段失控保护动作,执行CIRCLE盘旋等待。默认为0“不执行任何动作”) FS_LONG_TIMEOUT 5 (执行第一阶段失控保护动作5秒内,没有接受到油门输出信号,飞控执行第二阶段失控保护动作) FS_LONG_ACTH 1 (第二阶段失控保护动作,执行RTH返航。默认为0“执行当前动作”)
第9节,返航盘旋等待参数 Ardupilot固件默认返航点盘旋等待高度为100米高,玩家可根据各自飞场的不同地理情况进行调整。RTL返航逻辑为在返航点与起飞点以直线飞行,一边返航一边降低高度。 高度不足预设高度会自动快速爬升至指定高度执行返航。 修改返航高度参数如下: RTL_ALTITUDE 120 m 默认 100m RTL至起飞点后盘旋高度。 此参数设置为-1,则以飞机当前高度定高返航至起飞点上空盘旋等待。
飞机返航到起飞点上空后进行盘旋等待,相关盘旋参数也可以进行修改设置。 WP_LOITER_RAD 80 留待模式盘旋半径,默认60m
参数为正数+,飞机盘旋时做顺时针盘旋,参数为负数-,飞机盘旋时做逆时针盘旋。(此参数设置的盘旋半径,通用与RTL返航模式,Loiter定点留待模式的盘旋半径值)
第10节,飞控安装朝向修改 AHRS_ORIENTATION 部分玩家根据自己的载机机舱布局情况,无法使用默认水平安装飞控。特别是一些象真机改FPV载机,机型本身未预留飞控安装位置,需要将飞控粘贴在机舱侧面(侧置安装)或者黏贴在机舱底部(倒置安装)。我们需要通过调整AHRS_ORIENTATION的值来修改飞控的安装角度
举例1:飞控的主电源出线方向(默认机头方向)朝后,即飞控前后反向安装,则该参数值修改为4。(YAW 180)
举例2:飞控底部黏贴在机舱侧面,即飞控相当于ROLL轴翻转90度或270度,则该参数值为 16 或 20 。
举例3:剑鱼载机,需要倒置安装飞控且原飞控默认机头方向朝后,则为ROLL180 加上YAW180,在参数中并无对应选项,实际观察可以使用PITCH 180也能实现此安装调整。 则该参数值为12 第五章 OSD布局调整设置 进入OSD信息设置: 配置/调试--Onboard OSD--Screen1
Ardupilot的OSD显示设置与INAV调参有些类似(飞控内置OSD模块),属于最下面的OSD内容选项中勾选需要显示的项目,在页面中拖动到自己想要的位置即可。飞控通电并接入图传与摄像头时,拖动OSD项目的位置,点击右上角“Write customization”,即可在接受屏幕中看到OSD信息位置的更新。
如果觉得默认参数的OSD信息位置与自己的习惯不符,可以鼠标点击拖动值合适的位置。觉得下面OSD信息项目栏位置太小,可以勾选旁边的Reduced View 获得全景模式。 数字图传玩家,建议勾选旁边的HD Layout,可以获得更宽的拖拽页面。 玩家的电脑显示器显示分辨率太低(低于1920*1080),OSD拖拽界面有可能无法显示完全
上图框内就是各个OSD显示的项目名称, 常用的项目对应解释如下: BAT_VOLT 电池电压 CELLVOLT 单节电池电压 CURRENT 电流 POWER 当前系统功率 BATUSED 电量消耗 RSSI 遥控信号强度 SATS GPS 卫星数 HDOP GPS定位精度 FLTMODE 当前飞行模式 MESSAGE 系统信息 HORIZON 模拟地平线 HOME 离家距离 DIST 飞行航程 HEADING 离家方位角 THROTTLE 当前油门值 COMPASS 罗盘方位 GPSLAT GPS 纬度 GPSLONG GPS 经度 ROLL 当前姿态横滚角度 PITCH 当前姿态俯仰角度 ALTITUDE 当前相对高度 GSPEED 当前GPS地速 VSPEED 当前高度变化值 m/S 使用大疆G2、G3、N3视频眼镜的,推荐使用以下OSD布局设置
对应OSD布局画面在眼镜中显示为:
上图显示的OSD选项连同XY坐标值如下(用户可以直接选择对应的OSD项目,修改XY坐标值,直至调整到自己习惯的OSD布局为止) FLTIME 解锁飞行时间 14 19 DIST 飞行航程 5 19 HDOP 定位精度 6 1 PITCH 俯仰值 45 19 ROLL 横滚值 39 19 GPSLONG GPS经度 35 0 GPSLAT GPS纬度 35 1 VSPEED 当前高度变化值 38 10 COMPASS 罗盘方位 26 0 THROTTLE 当前油门值 10 10 HEADING 离家方位角 25 1 HOME 离家距离 5 18 HORIZON 模拟地平线 26 9 GSPEED 当前地速 7 9 MESSAGE 系统信息 15 5 FLTMODE 当前模式 31 19 SATS GPS卫星数 6 0 BATUSED 电量消耗 24 19 CURRENT 电流 6 17 RSSI 遥控信号强度 14 18 BAT_VOLT 电池电压 24 17 ALTITUDE 当前高度 38 9
DJI V1,V2眼镜部分OSD项目不能支持显示 (串口设置为 DJI FPV)。
已知常用的可以显示的为: 电池电压,电流,电量,GPS星数,经纬度,离家距离,高度,高度变化值,速度,RSSI,俯仰角,横滚角。
确认不支持显示的是: 模拟水平线,航程累计,离家方位角,模式名称,当前油门量。
使用DJI高清天空端及V1 V2高清眼镜,设置时须确认天空端供电正常,眼镜连接正常,并且大疆眼镜打开“自定义OSD”,即可显示眼镜所支持的OSD显示类型。
DJI数字图传(V1/V2眼镜)OSD内容对照(含XY座标值): HOMEDIR 指向家方向箭头 15 13 HOMEDIST 离家距离 2 13 CRSSHAIR 十字瞄准星 14 8 SIDEBARS 中心侧边栏 15 6 PITCH 俯仰角度 19 14 ROLL 横滚角度 19 13 GPSLONG 经度 0 0 GPSLAT 纬度 0 1 VSPEED 高度变化值 23 8 GSPEED GPS速度 4 7 MESSAGE 飞行模式 1 14 SATS GPS卫星数 8 14 BATUSED 电池电量消耗 13 14 CURRENT 当前电流 4 8 RSSI 当前遥控信号强度 9 13 BAT_VOLT 电池电压 13 13 ALTITUDE 高度 21 7
第7章 其他常用设置
第1节 电调油门行程校准
装机后需要对电调进行连接飞控状态的油门行程校准操作。油门校准须确保卸除螺旋桨,保证电机工作是无磕碰到周边物体。 具体操作: 将飞控通过USB线连接电脑,打开MP调参软件,连接飞控。
遥控器模式开关切换到Manual手动模式
在“飞行数据“---”动作”---点击“解锁/锁定”,确认显示“已解锁“,遥控器油门推到最高,此时电调连接动力电池(若电调主电源线与飞控电源板直接正负极焊接,则直接给飞控接动力电池)--等待电调检测电池123声音(不同的电调声音有可能不同)--油门拉到最低--电调确认油门最低值 滴一声长响。此时完成油门行程校准操作。
双发双电调,建议逐一对电调进行单独行程校准,可以通过对第一电调校准时,断开第二电调信号线与飞控的Servo口连接。待第一电调完成校准,拔下第一电调信号线,插上第二电调信号线,再重复一次校准过程对第二电调进行校准。
第2节 板载蓝牙数传连接 飞蛋AET F405A WING飞控板载蓝牙数传模块,用户可以使用笔记本电脑的蓝牙模块与飞控蓝牙进行配对。配对后可以不使用USB数据线,通过蓝牙数传完成飞控与电脑地面站连接。