飞蛋AET-F405A-WING飞控 使用ArduPilot固件固定翼调参保姆教程
本文旨在针对新手玩家对Ardupilot调参逻辑的梳理,指导使用飞蛋AET F405A WING 固定翼飞控安装到一台固定翼FPV载机的调参设置全过程。
飞蛋AET F405A WING固定翼飞控,使用飞控+电源BEC板双层设计,使用STM32F405VGT6主控芯片,ICM42688加速计陀螺仪芯片,DPS310气压计芯片,内置OSD,板载蓝牙数传模块,
6路UART串口,10路PWM信号输出,1路SDA I2C并行外设接口,
板载舵机BEC 5V最高10A持续电流
5V BEC可持续4A输出,满足串口外设5V设备供电需求。
9V BEC持续2A输出,满足大功率图传发射供电需求。

目 录
第一章 飞控固件刷写 第3~8页
第二章 飞控接线 第9~14页
第三章 基础调参
第1节:地面站连接及重置默认参数 第15~18页
第2节:进行加速计校准及水平校准 第19~26页
第3节:指南针设置 第27页
第4节:舵机机电调自定义设置Servo Outputs 第28~32页
第5节:飞控串口定义设置 Serial Ports 第33~36页
第6节:遥控器校准 第37~39页
第7节:GPS模块连接正确检查 第40页
第8节:飞控朝向及姿态显示检查 第41~45页
第一章:飞控固件刷写
飞蛋AET F405A WING飞控,目前支持ArduPilot固件,INAV固件。本文重点讲解针对ArduPilot固件的固定翼调参设置,我们可以通过固件刷写升级到最新固件。
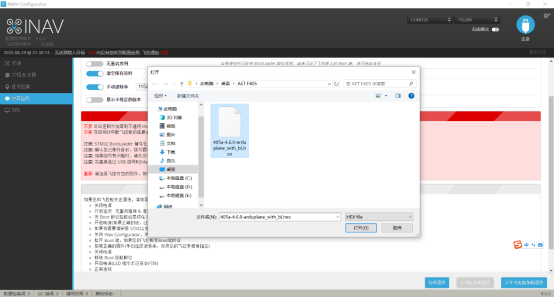
我们需要在飞蛋固件下载地址 https://download.aeroeggtech.com/ 下载厂家提供的 405a-4.6.0-arduplane_with_bl 即带bl引导的hex固件文件下载到电脑。

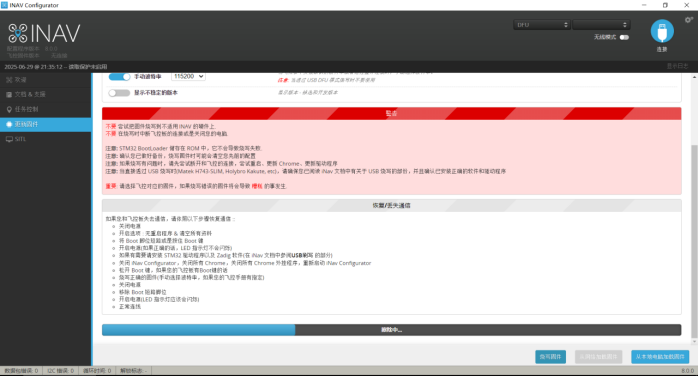
点击左侧“更新固件”—选择右下角“从本地电脑加载固件”—选择已经下载在电脑里的飞控固件。
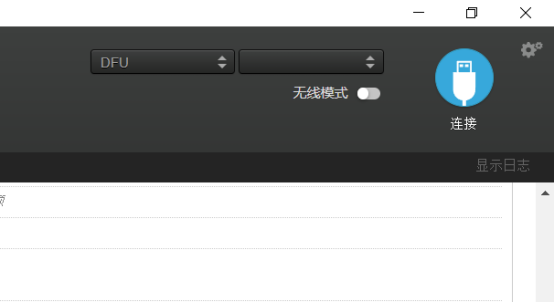
按住飞控的Boot按键不放,使用USB-TYPEC数据线把飞控与电脑连接,正常连接成功,INAV地面站右上角出现DFU表示,即可进入固件刷写。
部分玩家的电脑有可能因为驱动问题无法识别DFU模式,此时先在电脑系统的“设备管理器”查看“通用串行总线设备”—是否有“STM32 BOOTLOADER”设备。
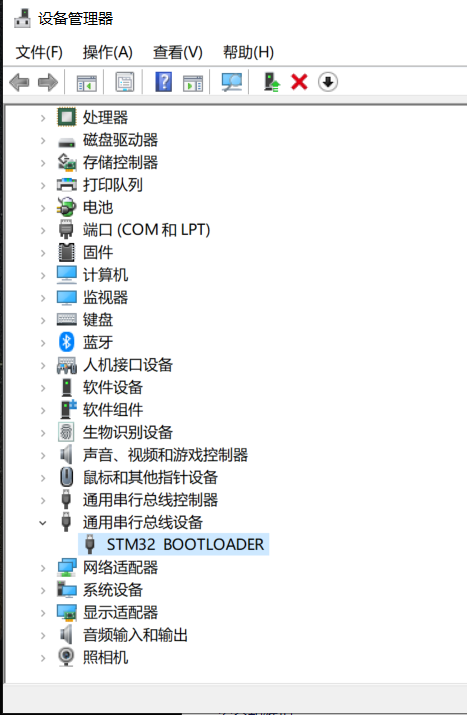
如果显示此设备有感叹号,则需要加载安装驱动程序。
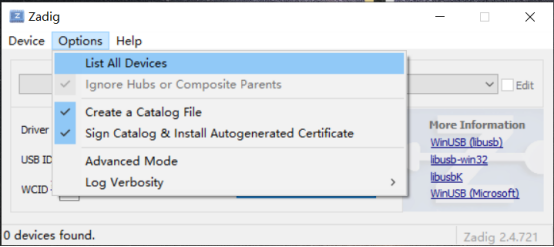
点击运行Zadig软件,点击Option,勾选下拉菜单第一项List All Devices
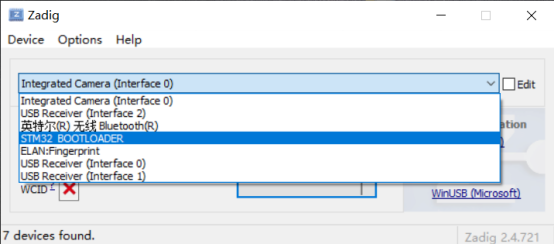
在主页面的下拉选项设备中选择 STM32 BOOTLOADER
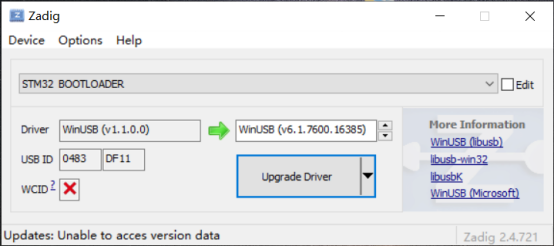
点击 Upgrade Driver 安装驱动
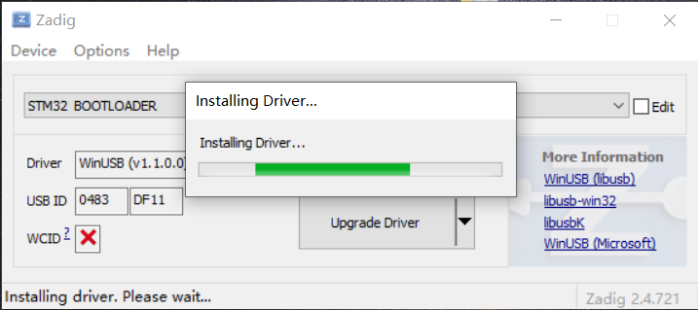
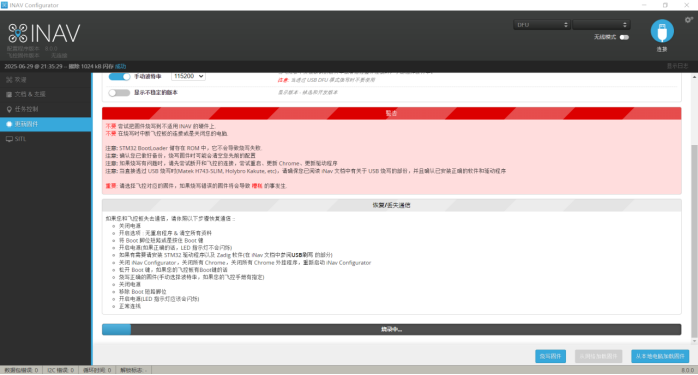
等待驱动安装。安装完成,断开飞控USB连接。重新按Boot键不放连接USB,即可正常识别DFU模式
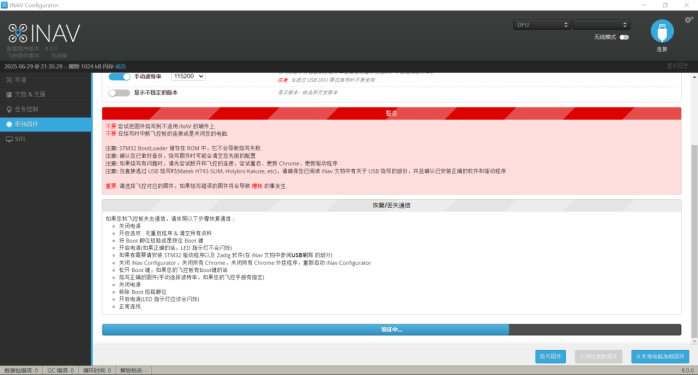
保持等待,地面站正常对飞控进行固件烧写
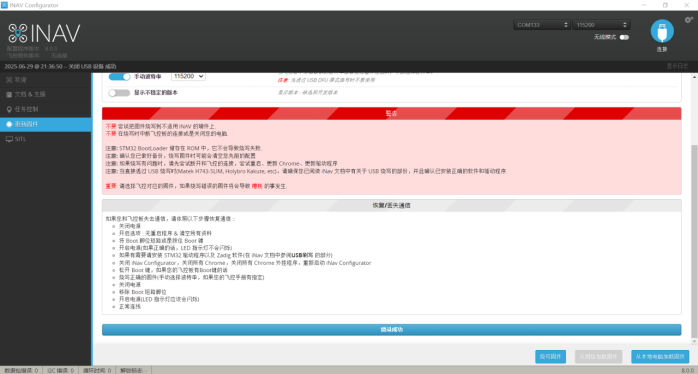
烧写完成,会自动进行验证。
显示 烧录成功,此时飞控固件写入完成。 关闭INAV地面站,飞控USB断开连接,重新插入连接电脑一次。
至此,我们已经完成对飞控固件的更新刷写。
注意:飞控固件烧写全过程,请断开所有串行总线外设连接。包含SBUS接收机,ELRS接收机,CRSF接收机,GPS模块,数字天空端,数传。
第二章:飞控接线
飞蛋AET F405A WING飞控接线图如下:
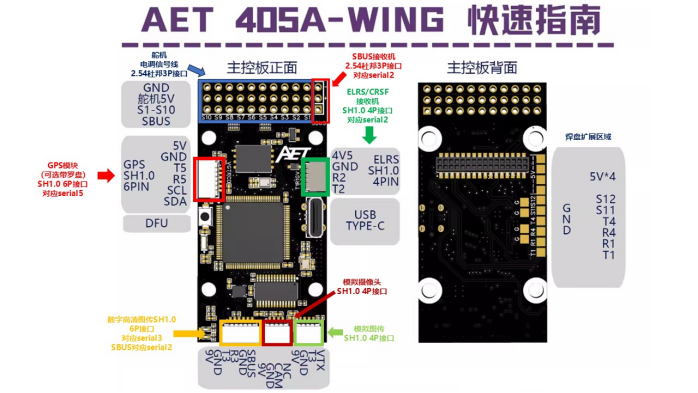
常见的外设有:GPS定位模块,SBUS接收机,ELRS接收机/黑羊CRSF接收机, 数字图传天空端(包括大疆O3、O4、Vista。蜗牛Caddx Avatar系列。开源高清图传OpenIPC) 空速计,电子罗盘等……
其中,GPS模块,SBUS接收机,ELRS接收机,黑羊CRSF接收机,数传模块,数字图传天空端为串口外设。 GPS模块的罗盘、模拟空速计 ,为i2c并行接口外设
有使用模拟空速计i2c并行设备的玩家,可以接到飞控的SDA SCL并口。详见本文第四章第12节。
串行总线接收机连接示范:
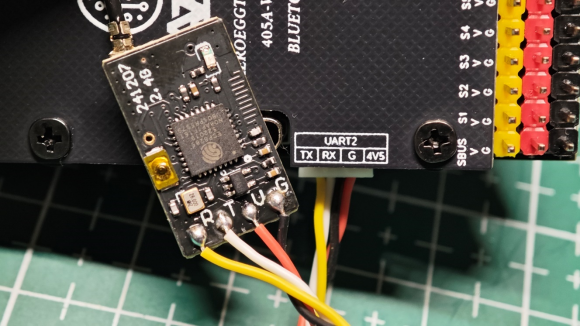
使用ELRS接收机,黑羊CRSF接收机,我们推荐与飞控的UART2端口连接,如上图。
接收机的R(或RX)连接飞控的TX,接收机的T(或TX)连接飞控的RX。
接收机的V(或5V)连接飞控的4V5,接收机的G(或GND)连接飞控的G。
连接后需要在地面站的Serial Ports页面进行相对应设置。
GPS模块(含电子罗盘)连接示范
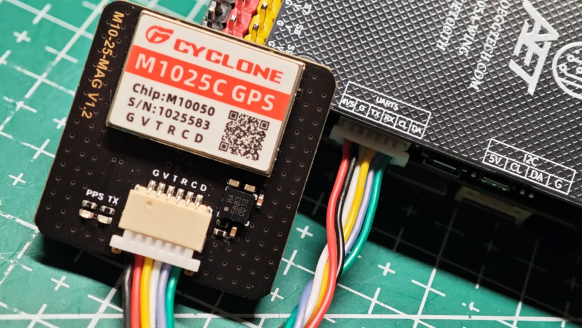
使用GPS模块,我们推荐与飞控的UART5端口连接,如上图。
GPS的R(或RX)连接飞控的TX,GPS的T(或TX)连接飞控的RX。
GPS的V(或5V)连接飞控的4V5,GPS的G(或GND)连接飞控的G。
GPS的C连接飞控的CL,GPS的D连接飞控的DA(CL、DA为并行总线i2c接口,接GPS带的电子罗盘。传统固定翼可不用选择安装电子罗盘。若GPS模块不带罗盘模块,CL、DA可无需连接)
连接后需要在地面站的Serial Ports页面进行相对应设置。
数字天空端连接示范
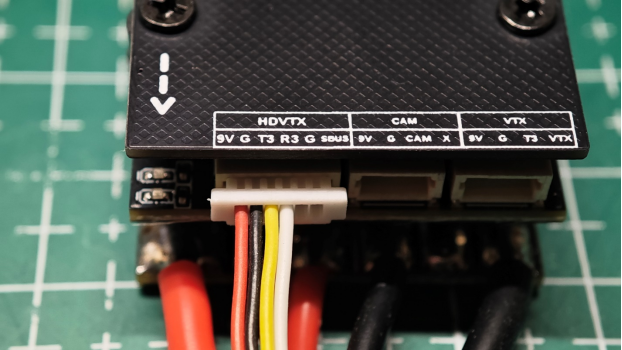
使用数字天空端,我们推荐与飞控的HDVTX接口(UART3端口)连接,如上图。
天空端的R(或RX)连接飞控的T3,天空端的T(或TX)连接飞控的R3。
天空端的V 连接飞控的9V,天空端的G(或GND)连接飞控的G。
由于大疆系列天空端内置与DJI FPV2遥控对频使用的SBUS接收机模块,不使用大疆FPV2遥控器的用户,请断开此端口排线SBUS线连接。
若使用DJI FPV2遥控器,请保持连接SBUS线。
连接后需要在地面站的Serial Ports页面进行相对应设置。
舵机连接示范

舵机接口一般为2.54杜邦3P接口,舵机线深色一般为G(GND)。红色或橙红色为5V舵机供电正极V,白色或橙黄色为舵机控制信号线S。对应连接飞控的S1~S10接口,飞控设置页面Servo Output的相关自定义设置。
电调信号线连接示范
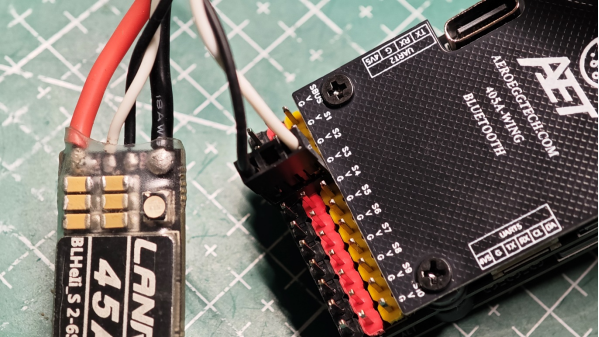
电调信号线接口一般为2.54杜邦3P接口,信号线深色一般为G(GND),对应连接飞控的S1~S10接口,浅色或白色为电调控制信号线S。部分带有内置BEC5V供电的电调,电调通电后信号线中间的5V电压输出容易与飞控内置的5V舵机供电BEC模块冲突,建议用户提前把此类电调信号线的5V线开,不要接入飞控。
对应飞控设置页面Servo Output的相关自定义设置。
第三章:基础调参:
第1节:地面站连接与重置默认参数。
打开MissionPlanner调参软件。

玩家若无法加载实时卫星地图,地面站的“飞行任务”页面,右边选择地图源。一般建议选择“高德卫星地图”。选择后关闭地面站,点击运行MissionPlanner调参软件,此后地面站的地图源则在线调用“高德卫星地图”
使用Type-C数据线把飞控与电脑连接,在MP软件右上角选择飞控对应的端口,如下图:

点击连接,稍等几秒,软件在读取飞控的数据。
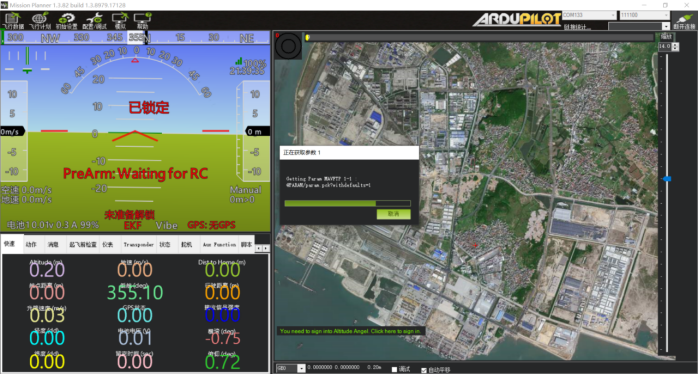
连接成功
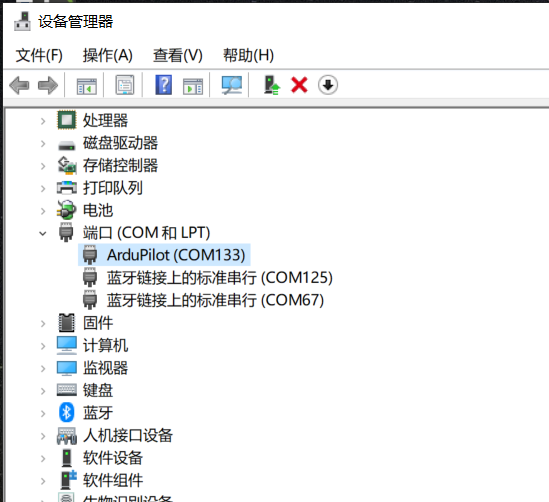
若连接USB后无法在端口下拉菜单中找到飞控选项。则需要检查电脑是否正确识别飞控驱动程序并分配端口。在电脑的设备管理器的端口栏进行查看。若没有分配端口号,则需要安装对应的驱动程序。
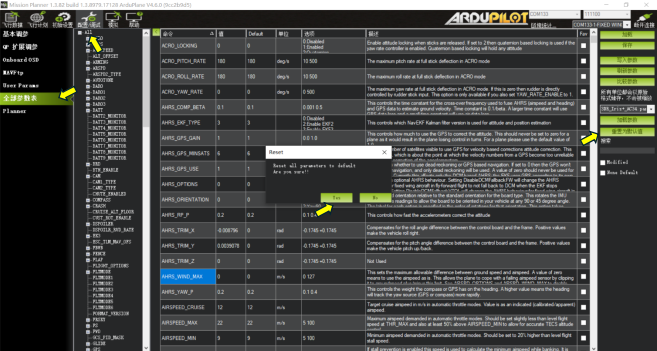
我们可以通过下图预览一下调参界面第一页概览

新固件刷写后,强烈建议先进行一次“重置默认参数”
操作为:“配置调试”--“全部参数表”--“重置默认参数”。
点击一次,地面站提示确认。点击yes即可。
第2节:进行加速度计校准及水平校准
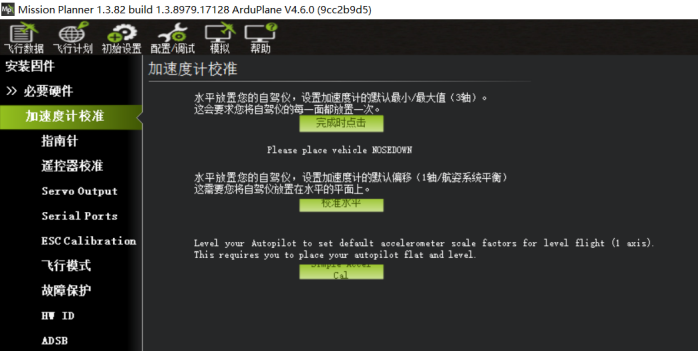
点击初始设置,加速计校准,
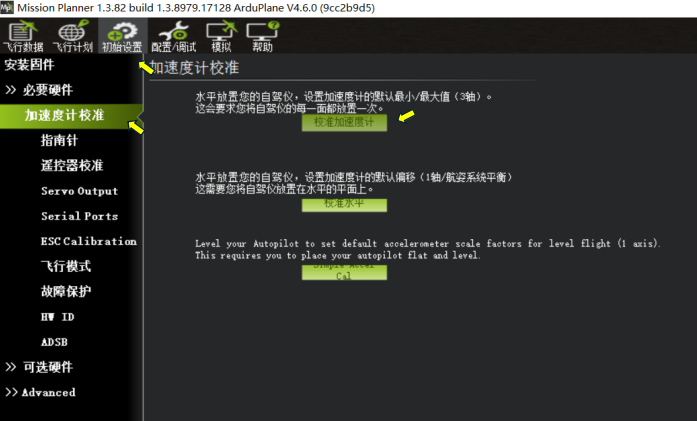
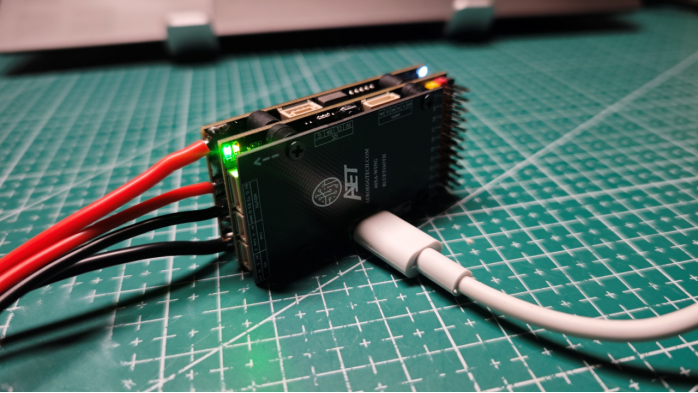
点击校准加速度计,根据软件提示,翻转飞控的六面,点击“校准加速度计”,依据提示对飞控的6个面进行校准。如下图
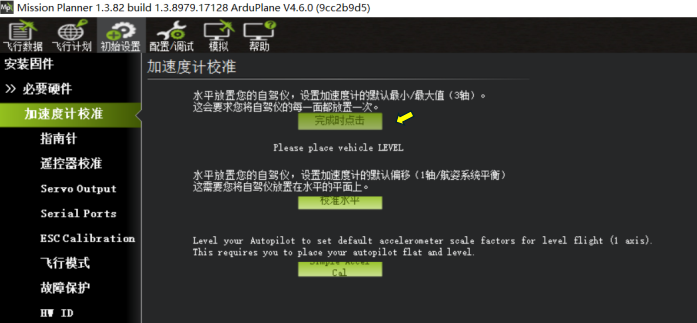
Please place vehicle LEVEL加速计校准--底面朝下,如下图
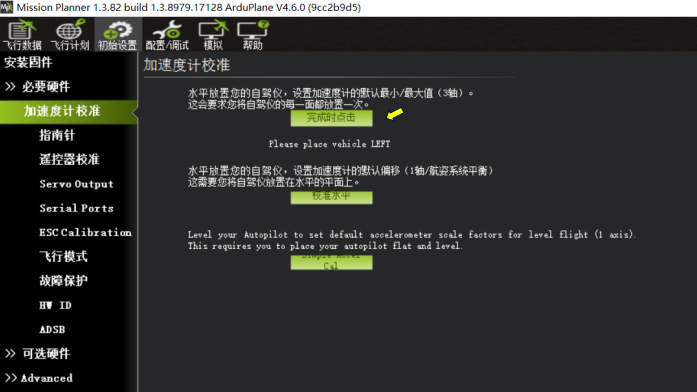
Please place vehicle LEFT加速计校准--左面朝下, 如下图
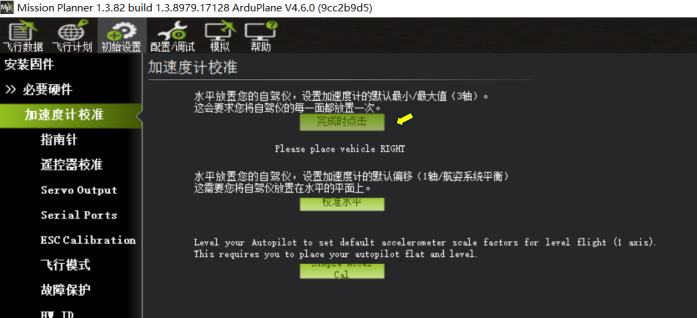
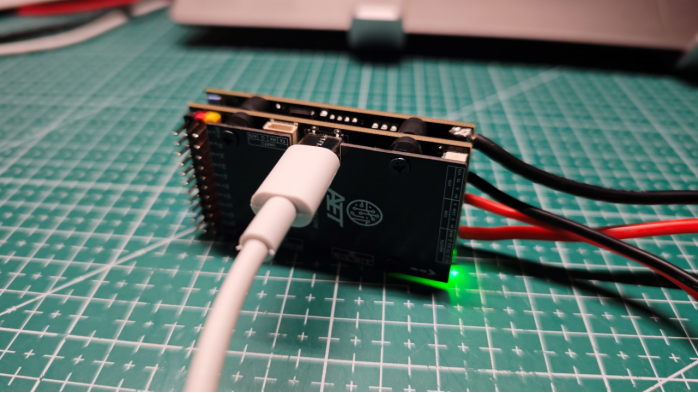
Please place vehicle RIGHT加速计校准--右面朝下
Please place vehicle NOSEDOWN加速计校准--前面朝下
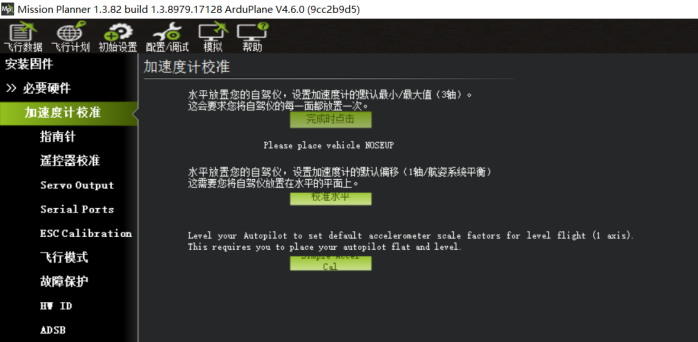
Please place vehicle NOSEUP加速计校准--后面朝下

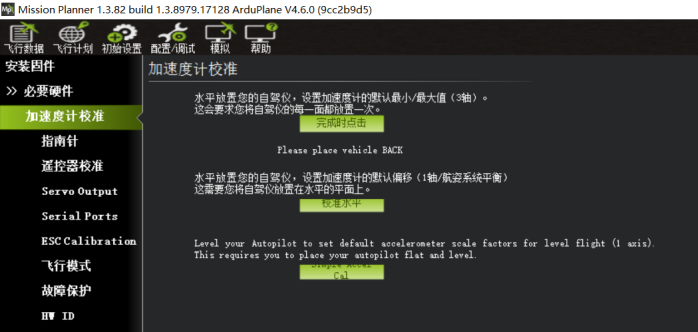
Please place vehicle BACK加速计校准--顶面朝下
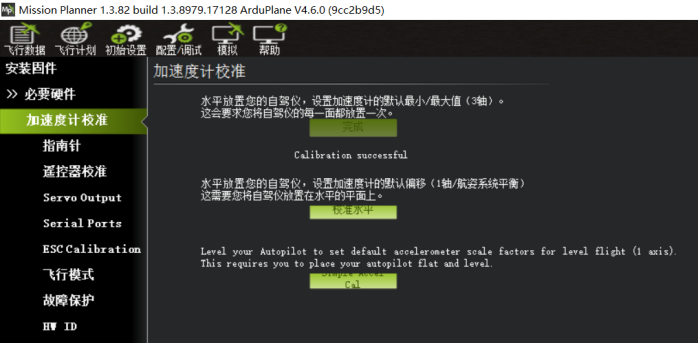
校准完成
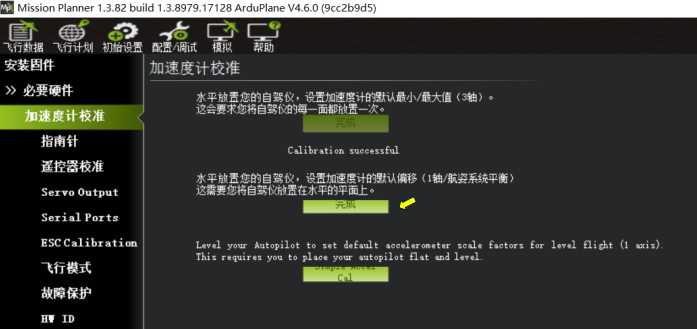
校准水平,可以在飞控装机后,飞机平放,然后执行一次校准水平即可。
第3节:指南针设置。
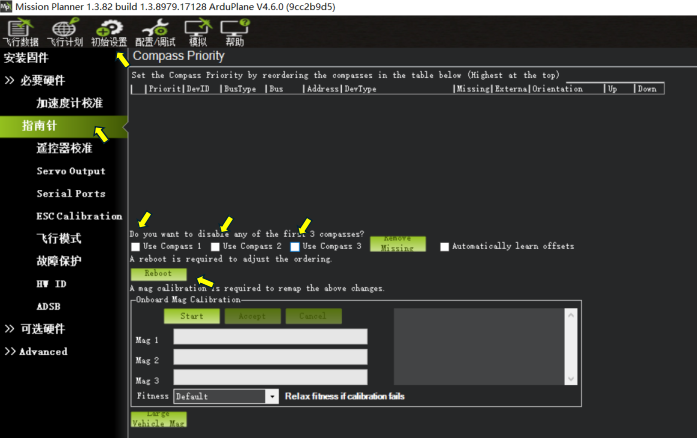
固定翼基础使用过程中,指南针(电子罗盘)非必须安装。
我们可以关闭飞控预开启的指南针选项。
在初始设置—指南针 页面,
取消勾选:Use Compass1,Use Compass2,Use Compass3
点击Reboot 重启飞控。
第4节,舵机机电调自定义设置Servo Outputs

Ardupilot固件对飞控的S1~S10的输出支持完全自定义,
上图对应的#1即为飞控的S1,#2即为飞控的S2,以此类推。
默认参数为常规布局的AETR模式,如上图
Aileron 为副翼横滚舵机
Elevator为俯仰升降尾舵机
Throttle为电调油门信号
Rudder为垂直方向舵机
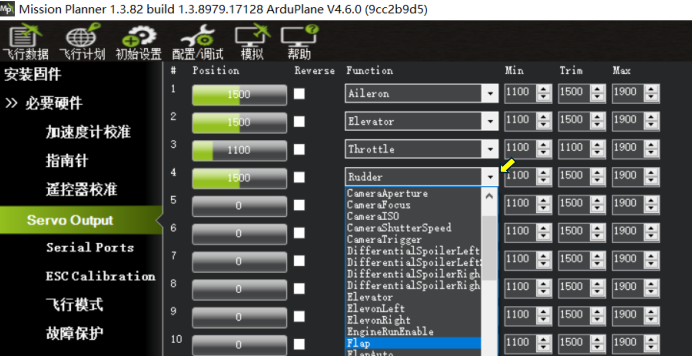
每个Servo输出通道都可以在对应的下拉菜单中选择定义,这是Ardupilot固件最有特点的地方之一。修改Servo的自定义设置,需要重启飞控才能生效。 我们常见的定义类型如下:
Aileron 为副翼横滚舵机
Elevator为俯仰升降尾舵机
Throttle为电调油门信号
Rudder为垂直方向舵机
ElevonLeft 飞翼左舵机(副翼升降混控)
ElevonRight 飞翼右舵机(副翼升降混控)
ThrottleLeft 双发差动左电机电调油门信号
ThrottleRight 双发差动右电机电调油门信号
VTailLeft V尾左舵机(升降方向舵混控)
VTailRight V尾右舵机(升降方向舵混控)
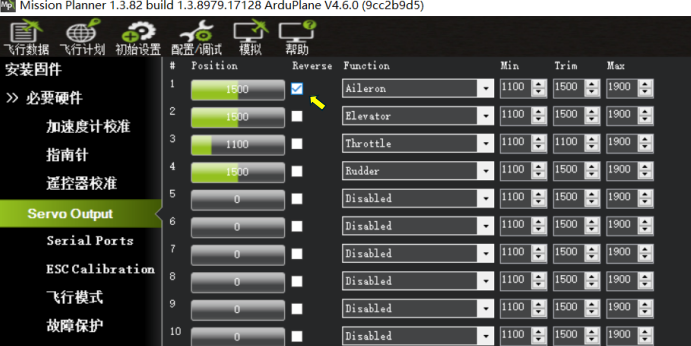
Ardupilot的通道输出为实时输出,后期进行通道辅助修正调整的时候,发现飞控执行飞机姿态修正的时候,通道输出方向错误,在对应通道的"Reverse"处勾选,对应通道的输出即可反向。
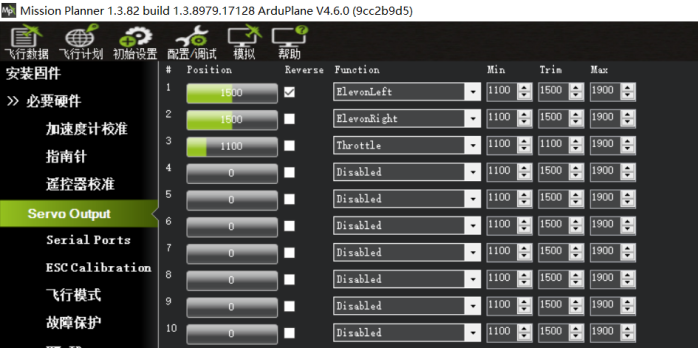
举例1:用户装一台单发尾推飞翼(ARWING,自由者等),选择S1接飞翼左舵机,则#1设置为ElevonLeft,在装机调试过程中发现该舵机输出方向反,则勾选#1的Reverse使该舵机输出动作反向。选择S3接电调信号线,则#3设置为Throttle。

举例2:用户装一台3D打印飞机的双发V尾机型,使用双电机差动控制。副翼2个舵机接在S1,S2。则#1、#2都可以设置为Aileron。S3接左边机翼的电调信号,则#3设置为ThrottleLeft。S4接右边机翼电调信号,则#4设置为ThroleLeft。S5接V尾的左舵机,#5设置为VTailLeft,S6接V尾的右舵机,则#6设置为VTatlRight。

举例3:用户装一台大白鲨(肥翁),典型的传统翼型布局双发动力,不想使用双发差动控制。副翼2个舵机接在S1,S2。则#1、#2都可以设置为Aileron。S3/S4可任意选择接两边机翼的电调信号,则#3#4设置为Throttle。S5接平尾的升降舵机,#5设置为Elevator,S6接尾的垂直尾翼方向舵机,则#6设置为Rudder。
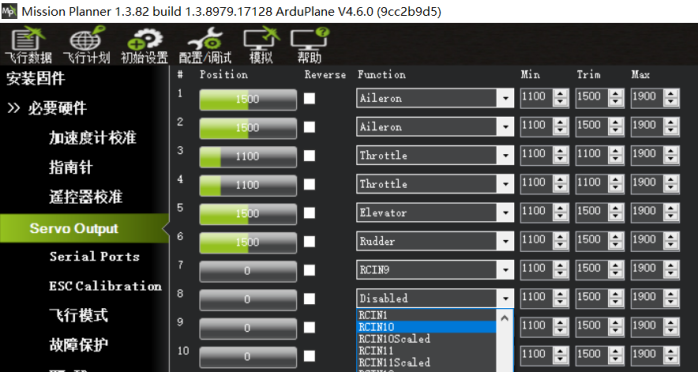
举例4:用户想在飞控的S8接一个舵机云台控制FPV摄像头的观察方向,使用遥控器的自定义旋钮开关的10通道来控制这个云台舵机,则可以把#8设置为RCIN10。
第5节,飞控串口定义设置 Serial Ports
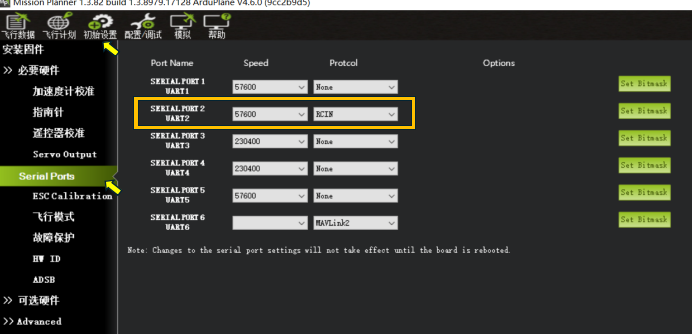
用户需要对连接飞控的串行总线接口外设进行定义。
飞控的默认参数如上图,第一列Port Name指的是对应串口的名字, 例如SERIAL PORT2指的就是串口2(即UART2)。Speed列为对应接口设置的波特率值。
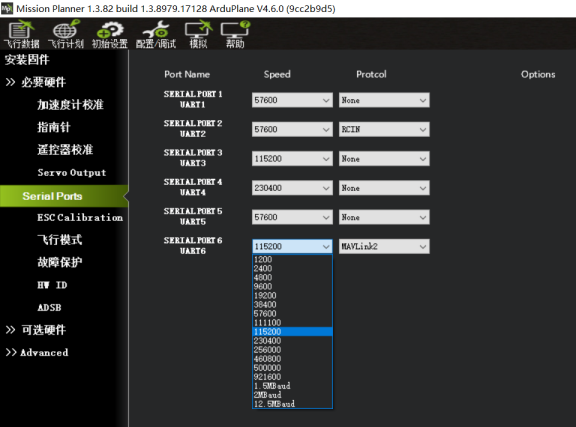
Protcol列为对应接口的定义类型。我们根据不同的串口外设设置不一样的Speed值及Protcol类型
接收机设置:
如果使用SBUS接收机(例如天地飞wbus,乐迪系列,Futaba系列接收机等),直接使用2.54杜邦3P头接到飞控的SBUS口。SBUS口对应SERIAL PORT2(即UART2),此时飞控的默认参数 57600 RCIN就直接自动识别SBUS接收机信号。
如果使用ELRS/CRSF接收机,接收机需要使用sh1.0 4P接口 接入飞控侧面UART2接口,(接线图参考本教程第10页)。此类接收机的参数一般为115200 RCIN。
飞控固件已经不支持PPM信号接收机,以及PWM信号接收机。
GPS模块设置:
GPS需要使用Sh1.0 6P接口 接入飞控侧面UART5接口,(接线图参考本教程第11页)。多数GPS的参数一般为38400 GPS。
部分GPS模块的Speed波特率值可以到115200。
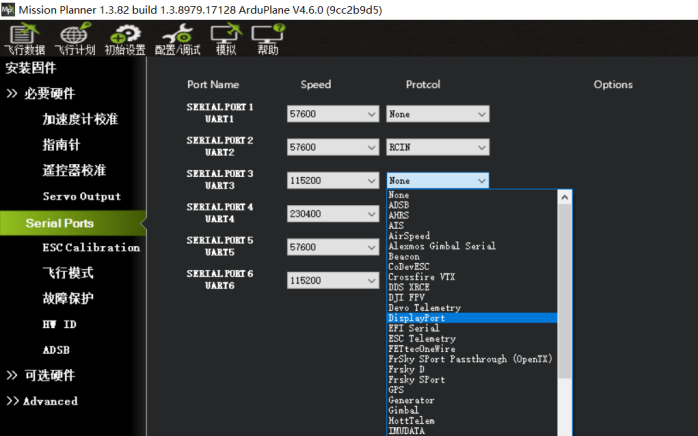
数字图传天空端设置:
数字图传天空端需要使用Sh1.0 6P接口 接入飞控前面HDVTX接口,对应UART3接口(接线图参考本教程第12页)。数字图传天空端参数一般为115200 DispiayPort。
(包含大疆G2,G3,N3眼镜能配对使用的大疆天空端。蜗牛Caddx Avatar系列天空端,开源高清图传OpenIPC)
使用大疆V1、V2眼镜对应大疆老款天空端及Vista,则对应UART3接口的Protcol值选择DJI FPV。
飞控板载蓝牙数传模块设置
AET F405A WING飞控板载蓝牙数传模块,直接对应UART6接口。
则该接口的参数选择 115200 Mavlink2
外置数传模块设置
外置数传模块推荐连接飞控板背面的TX1 RX1焊接点,对应UART1接口
常用数传的参数一般为: 115200 Mavlink2
常用外设接口推荐设置如下图
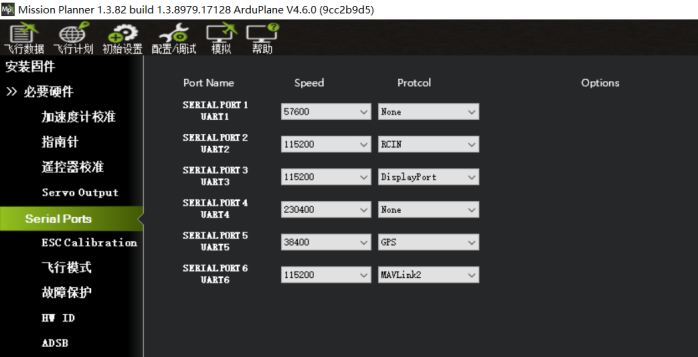
UART2接口连接ELRS接收机, UART3接口连接数字高清天空端, UART5接口连接GPS模块, 保留飞控板载蓝牙数传模块对应UART6。
设置好所有串口外设,并连线正确,此时接收机,GPS模块已经与飞控正确连接并完成设置,我们可以通过以下步骤检查遥控信号通过接收机接入飞控,以及GPS模块连接飞控工作正常。
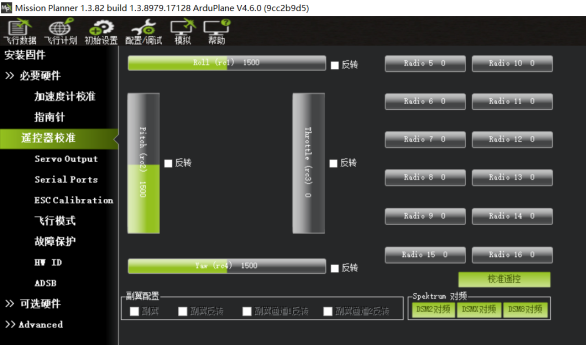
第6节,遥控器校准
如果遥控器开机,接收机与遥控器正常对频,但是接收机与飞控的连接不正确或者对应串口设置不正确,在遥控器校准页面则看不到Thrttle油门信号、以及5~16通道的通道信号值。如下图所示
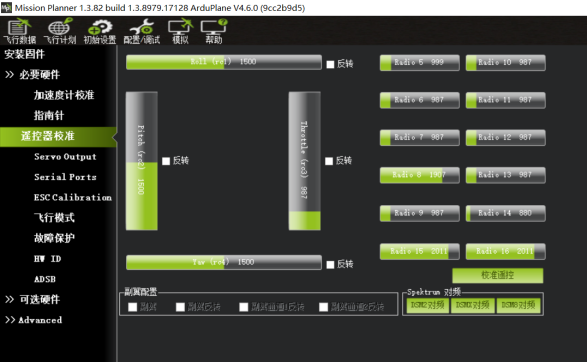
接收机与飞控连线正确且对应的串口设置正确,则可以看到所有通道有绿色滑块值。
此时我们开始对遥控器的摇杆及其他开关通道进行校准。
点击“校准遥控”弹出对话框”Ensure your transmitter is on and receiver is powered and connected。Ensure your motor does not have power/no props!!!”旨在提示请确认遥控器油门通道的方向,以及确保电机未接电及未安装螺旋桨。点击OK。如下图:

弹出对话框“Click OK and move all RC sticks and switches to their extreme positions so the red bars hit the limite”旨在提示点击该OK栏后,注意将所有通道的遥感打满,开关通道及6端开关通道打满,确保看到通道显示红色栏为通道输出的最大值及最小值。 点击OK。如下图:

此时将所有通道的摇杆打满,开关通道及6端开关通道打满,可以在画面中开到通道是输出最大值和最小值有红色栏进行圈定,(Ardupilot固件的特点,建议勾选Pitch rc2 反转)点击“完成时点击”。如下图

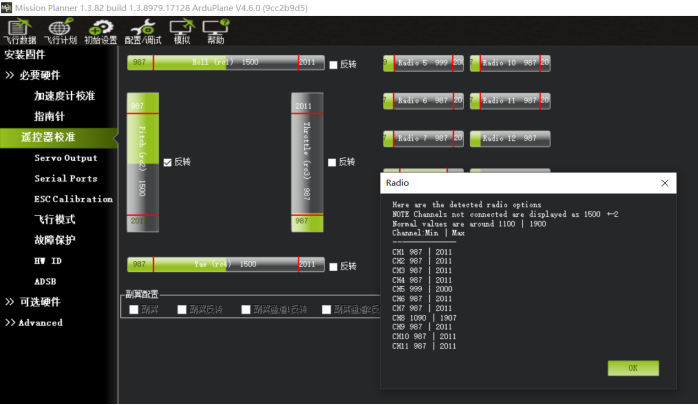
点击OK后,弹出对话框,显示各个通道输入的最大值与最小值,点击OK。如下图:
此时我们完成遥控器校准步骤
第7节:GPS模块连接正确检查
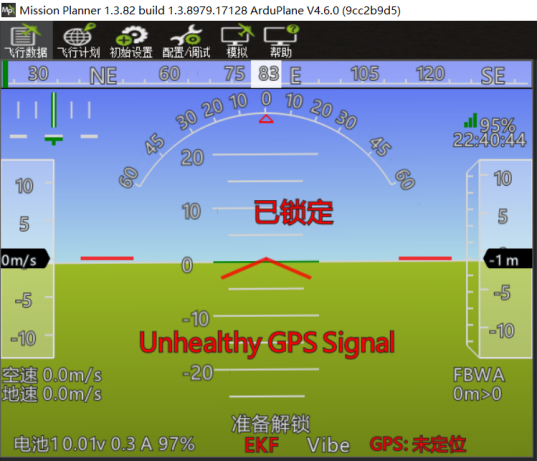
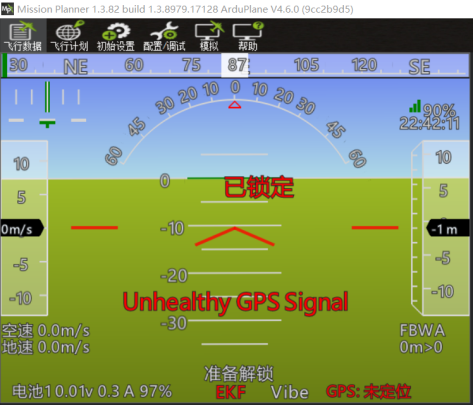
GPS连接正确,串口设置正确,工作正常,我们在地面站首页姿态仪框右下角, 可以看到”GPS未定位“红色字样。在室外完成搜星定位,则显示 GPS:3D定位 白色字样
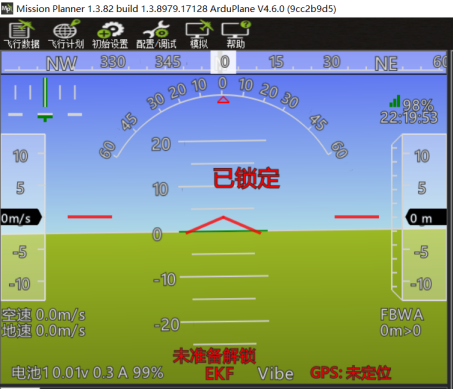
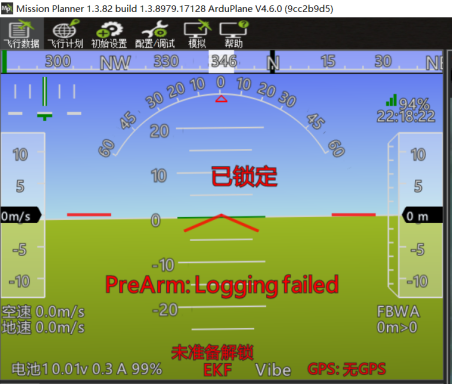
如果GPS连线错误,串口设置错误,或者GPS本身兼容性问题或者质量问题。飞控无法正确识别GPS,姿态仪框右下角则显示: GPS: 无GPS 红色字样。
第8节:飞控朝向及姿态显示检查
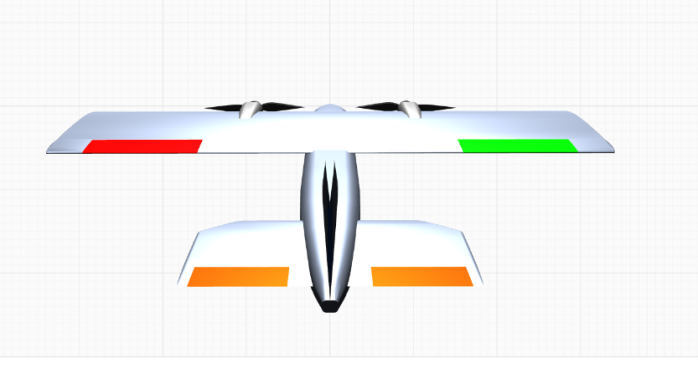
Ardupilot固件的姿态仪框,可以理解为用户坐在驾驶舱内的第一视角,而不是第三方视角。
上半部分蓝色区域为模拟天空部分,下半部分绿色区域为模拟地面部分,天空与地面连接线为地平线。
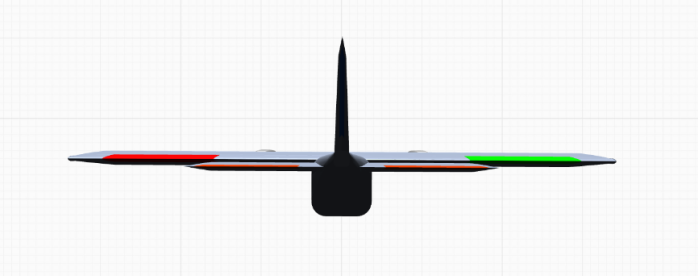
此时飞机或飞控的姿态为水平姿态,如下图,标准检查视角为飞机的对尾视角。
当飞机(或飞控)抬头,蓝色天空占多数,绿色地面占少数。姿态框显示如下:
此时飞机的正确姿态应该为:
当飞机(或飞控)底头,蓝色天空占少数,绿色地面占多数。姿态框显示如下:
此时飞机的正确姿态应该为:
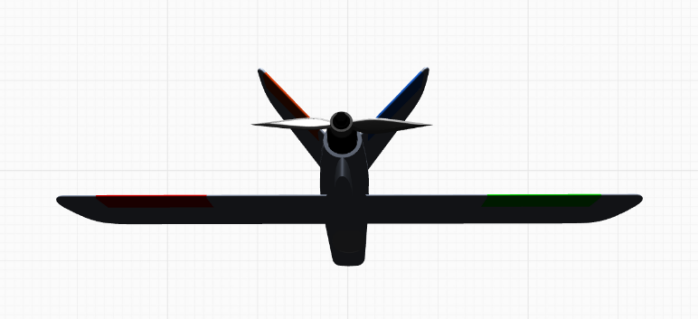
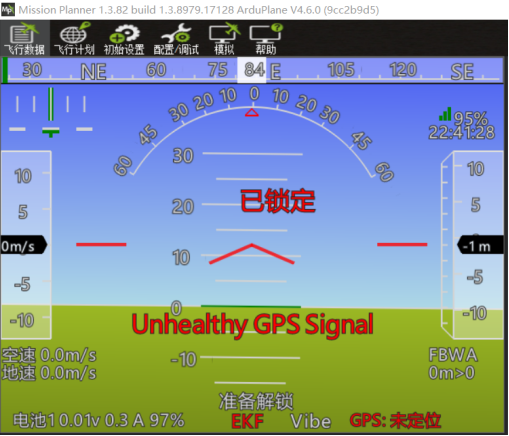
当飞机(或飞控)左倾,特别注意,用户可以闭上眼睛模拟一下自己坐在驾驶舱里左倾,驾驶窗看到的天空与地平线的变化。此时正确的姿态框显示如下:

此时从第三方视角看到的飞机姿态应该为:
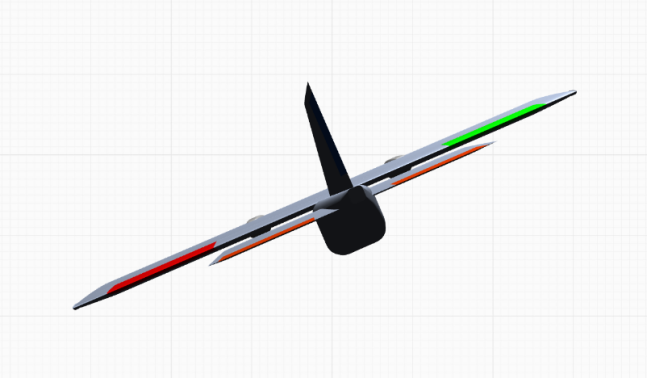
当飞机(或飞控)右倾,特别注意,用户可以闭上眼睛模拟一下自己坐在驾驶舱里左倾,驾驶窗看到的天空与地平线的变化。此时正确的姿态框显示如下:

此时从第三方视角看到的飞机姿态应该为: