第三章 基础调参
第1节:地面站连接 打开MissionPlanner调参软件

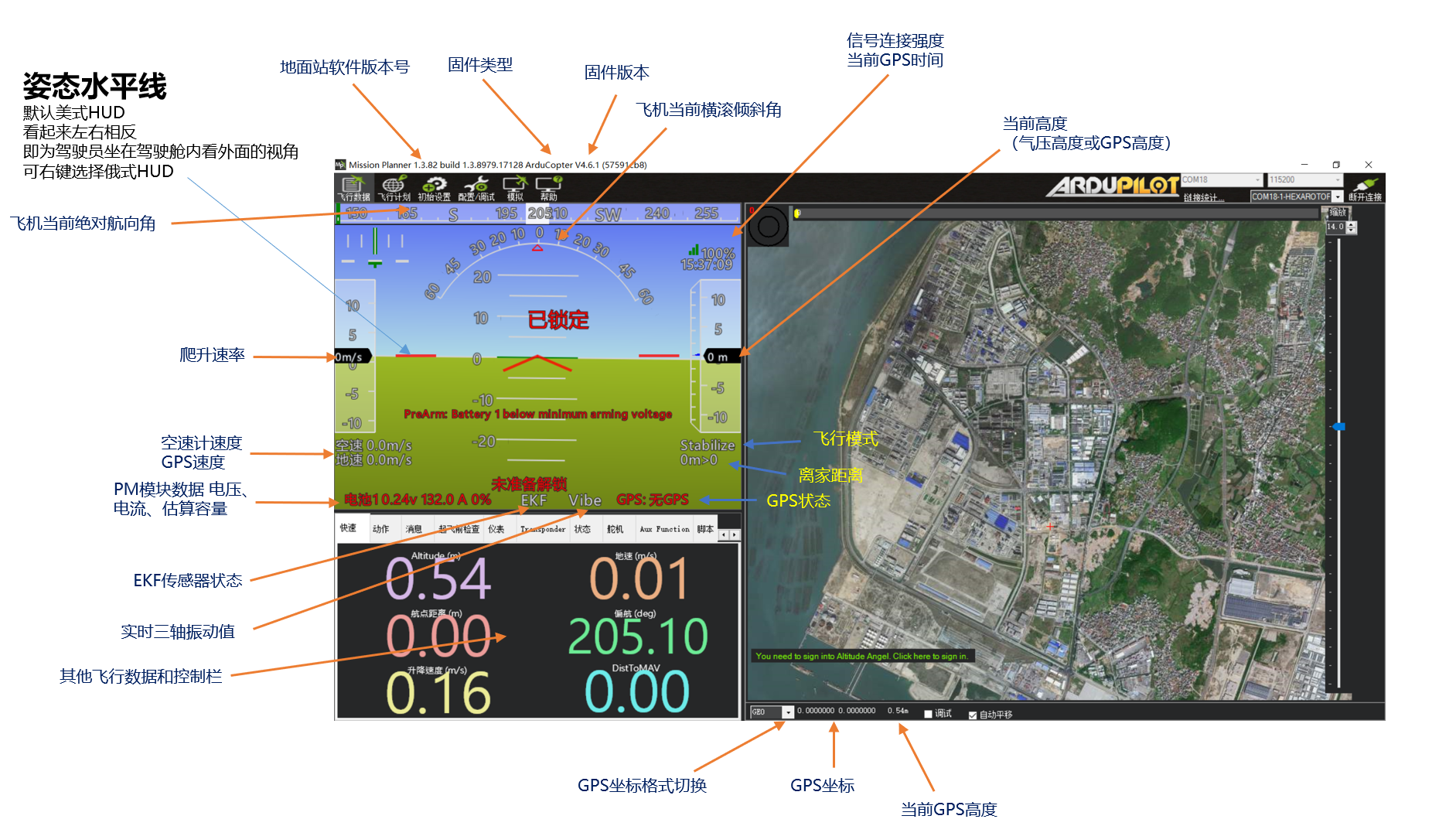
使用Type-C数据线把飞控与电脑连接,在MP软件右上角选择飞控对应的端口,如下图:
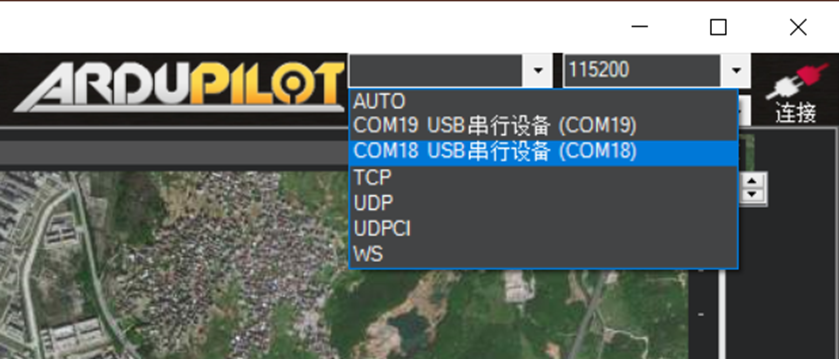
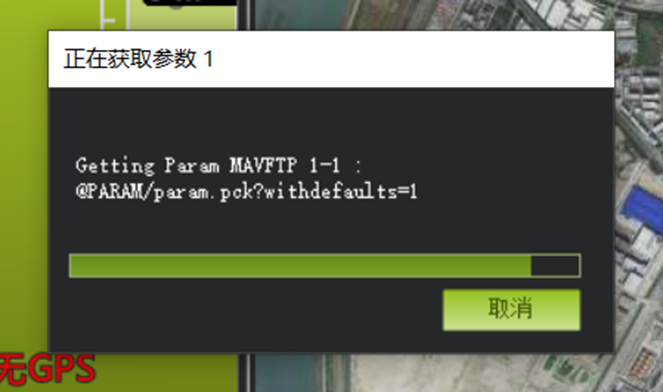
点击连接,稍等几秒,软件在读取飞控的数据。
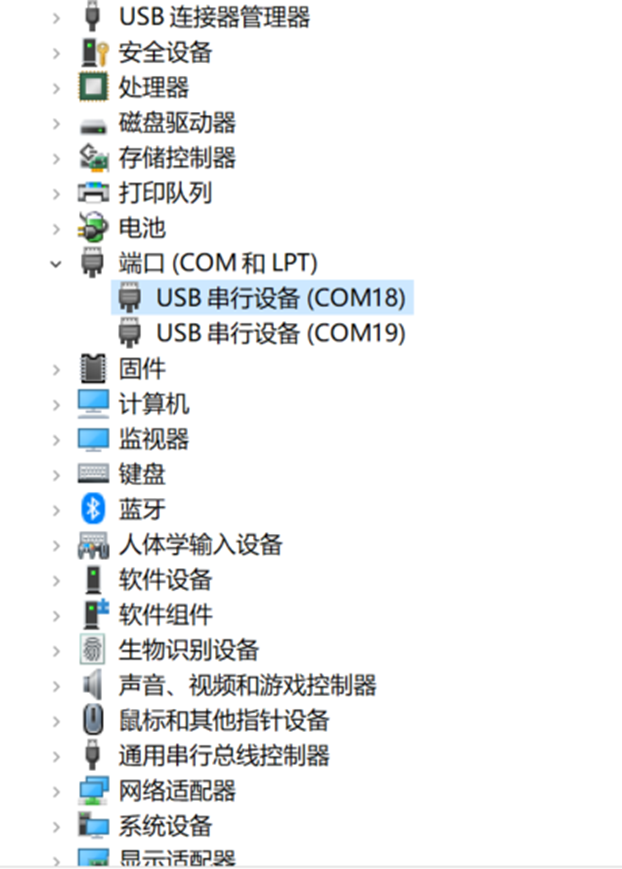
若连接USB后无法在端口下拉菜单中找到飞控选项。则需要检查电脑是否正确识别飞控驱动程序并分配端口。
在电脑的设备管理器的端口栏进行查看。若没有分配端口号,则需要安装对应的驱动程序。
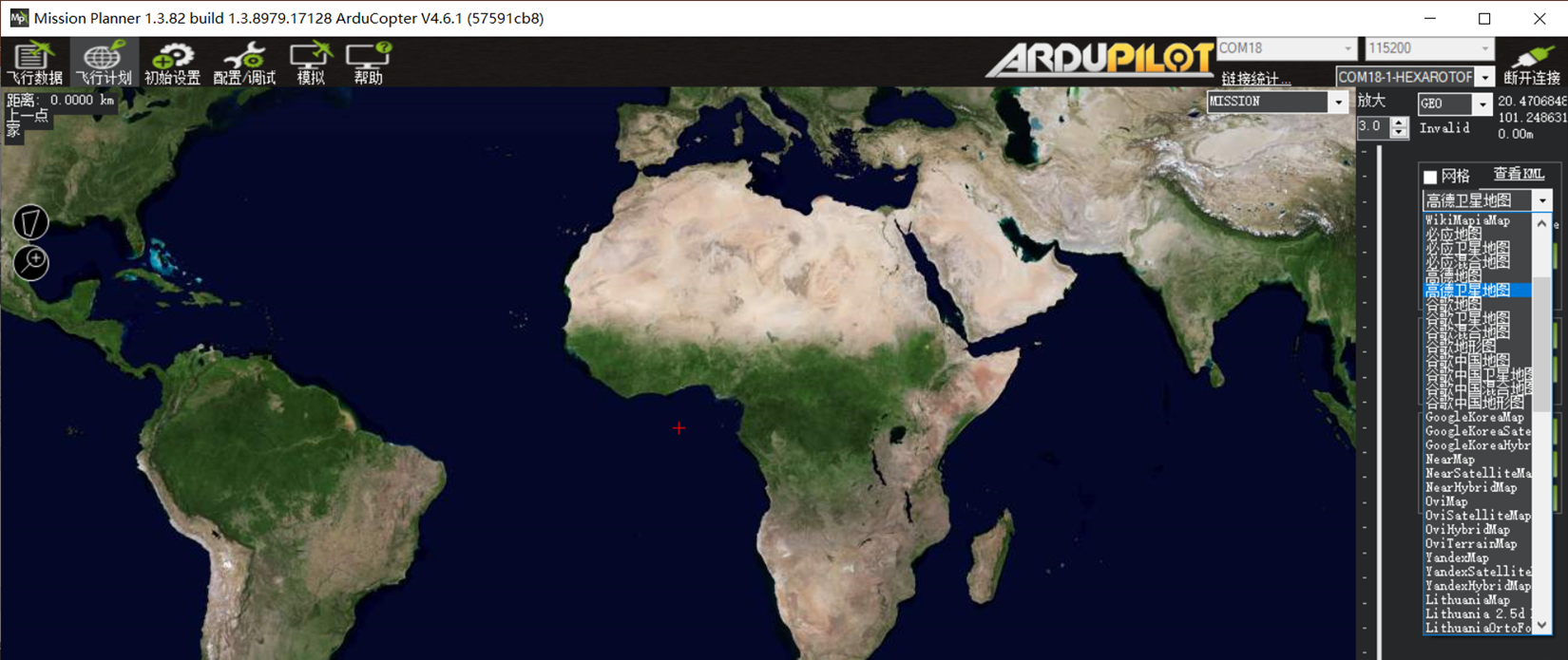
用户若无法加载实时卫星地图,地面站的“飞行计划”页面,右边选择地图源。一般建议选择“高德卫星地图”。选择后关闭地面站,点击运行MissionPlanner调参软件,此后地面站的地图源则在线调用“高德卫星地图”
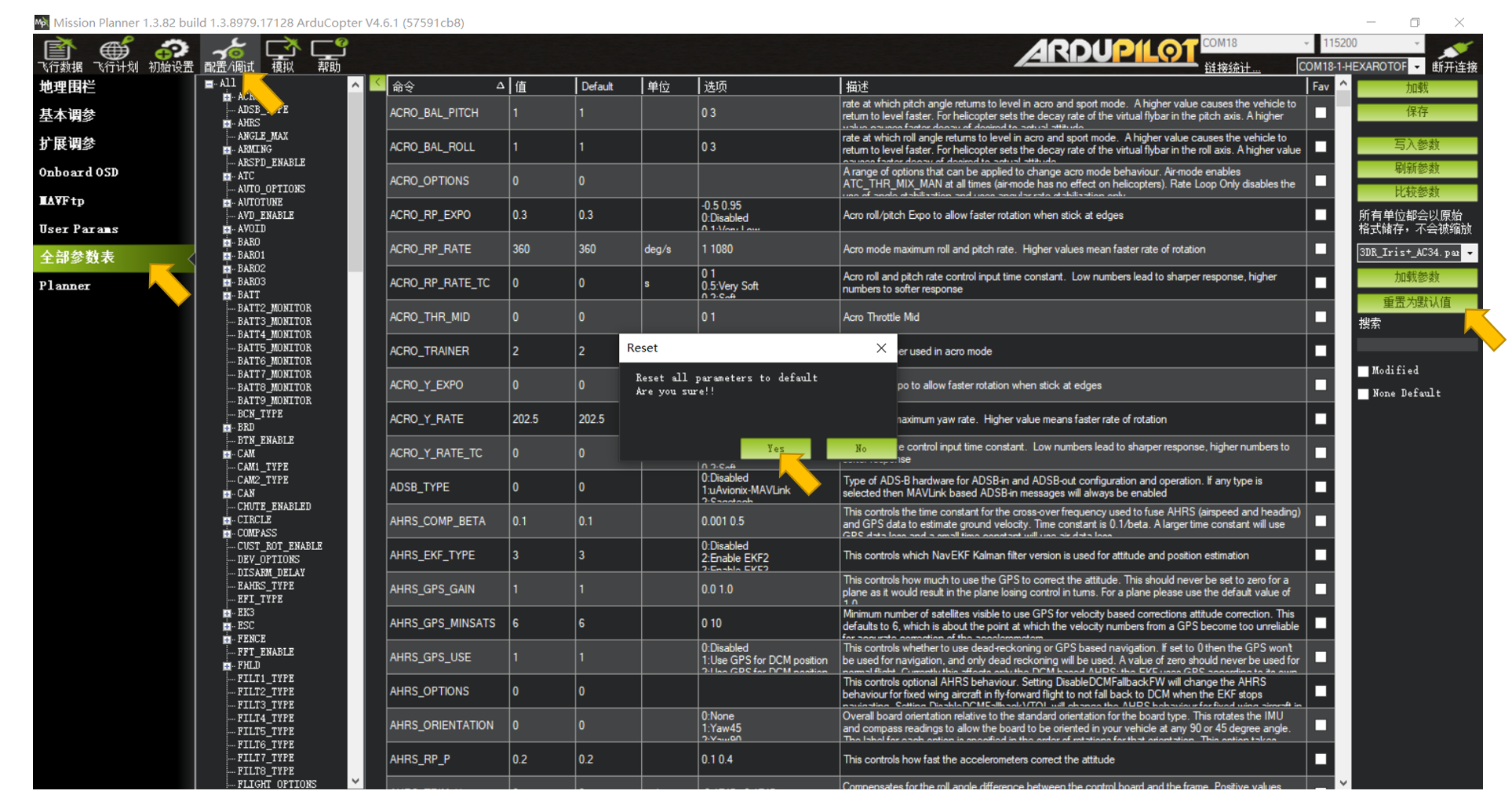
新固件刷写后,强烈建议先进行一次“重置默认参数”
操作为:“配置调试”--“全部参数表”--“重置默认参数”。
点击一次,地面站提示确认。点击yes即可。
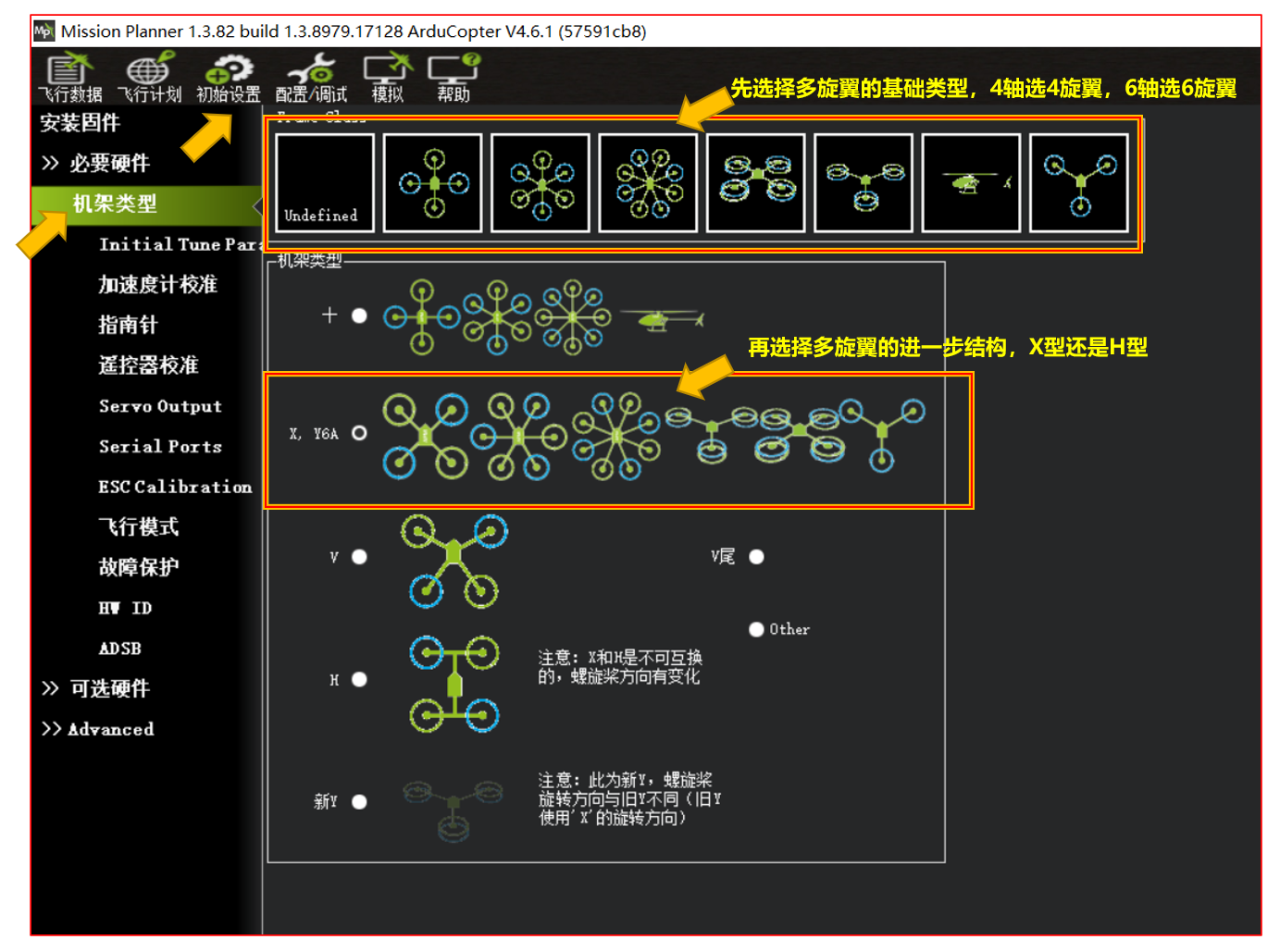
第2节 机架类型选择: 点击“初始设置”—机架类型—默认选择X,Y6A。即常见的X4轴,6轴,8轴,X8轴
Tuning Process Instructions基础参数预设,让飞控根据预设提供基础PID参数值
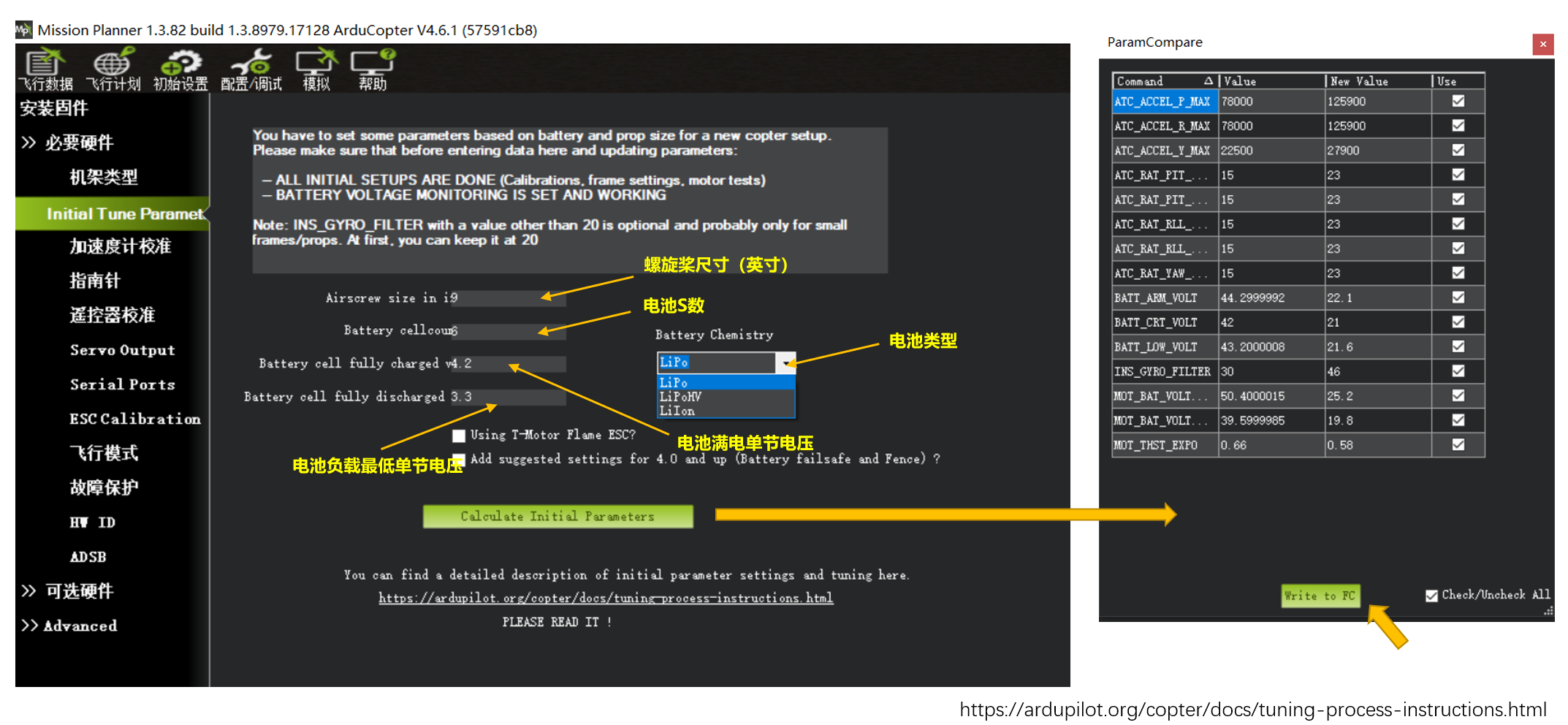 https://ardupilot.org/copter/docs/tuning-process-instructions.html
https://ardupilot.org/copter/docs/tuning-process-instructions.html
加速计校准1
点击校准加速度计,根据软件提示,翻转飞控的六面,点击“校准加速度计”,依据提示对飞控的6个面进行校准。
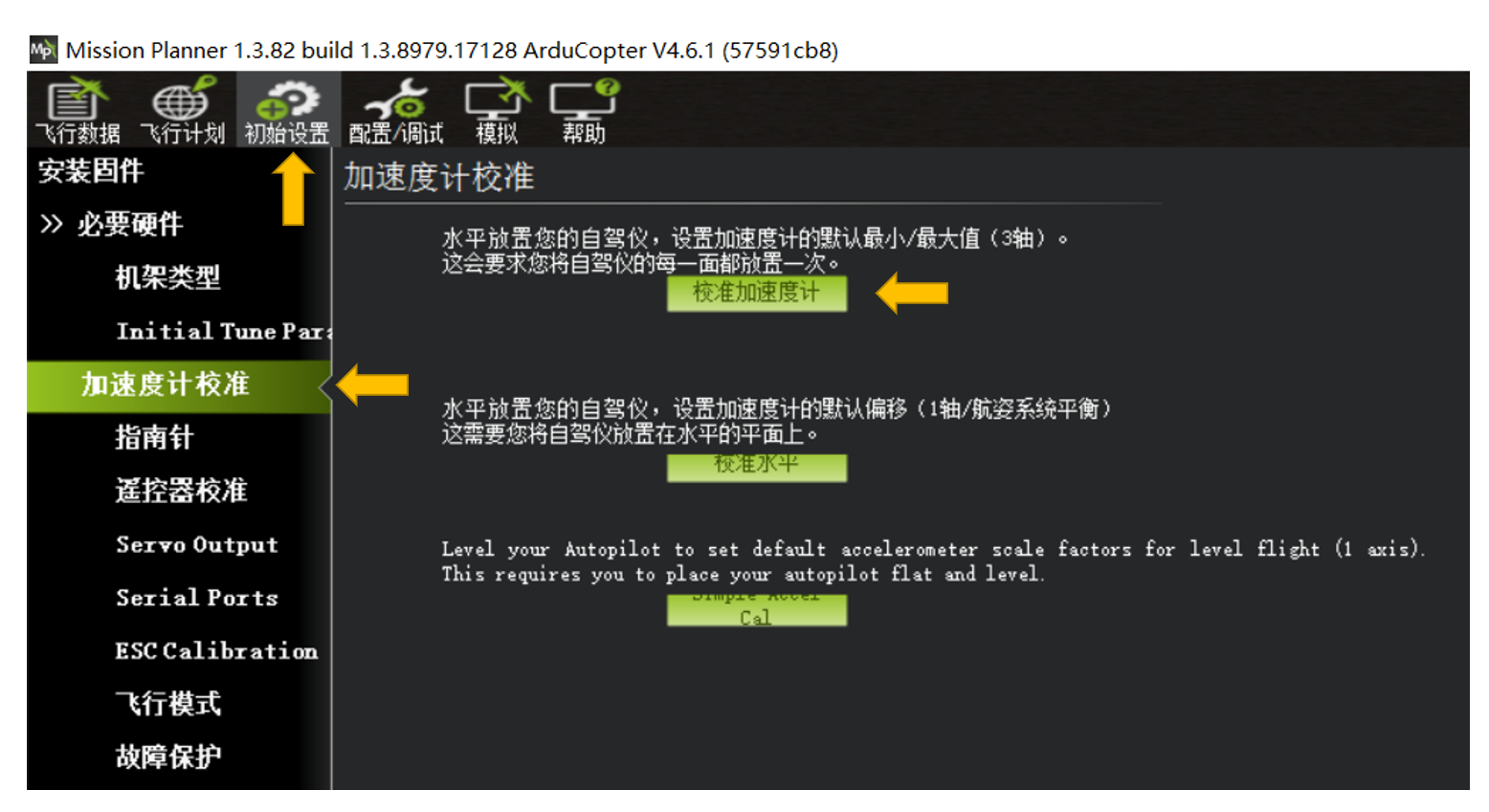
Please place vehicle LEVEL加速计校准--底面朝下
