【社区贡献文档】飞蛋 AET-H743-Basic 飞控 INAV 简易调参流程
INAV8.0地面站下载地址
https://github.com/iNavFlight/inav-configurator/releases/tag/8.0.0
固件下载地址
https://github.com/iNavFlight/inav/releases
飞蛋镜像下载站(防止 GitHub 下载不了)
1. 刷入固件
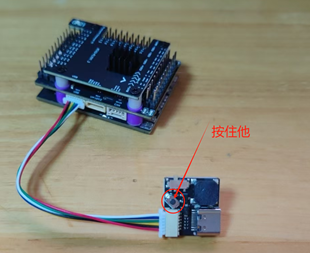
如图按住USB小板上的BOOT按钮,同时将数据线插入电脑
第一次打开可能是英语,没关系,找到如图右上角的小齿轮点击它。
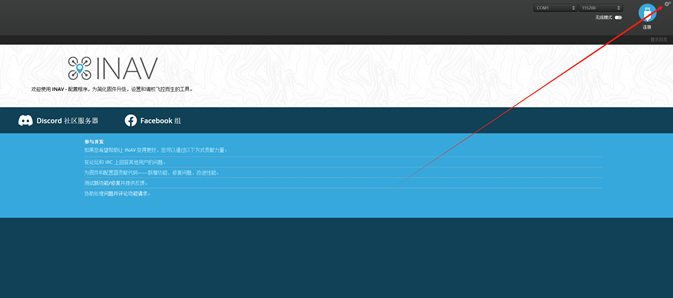
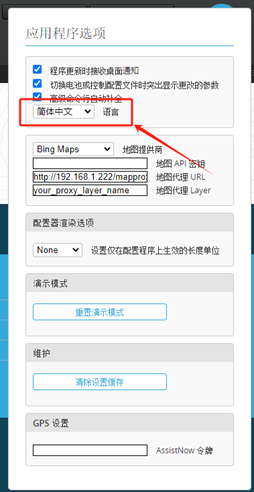
点击弹出菜单,在这里选择语言就可以啦。
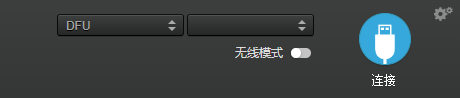
飞控连接电脑后右上角选择COM口的框框里变成了DFU则成功进入了刷机模式
这时我们不要点击连接,而应该在左侧选择打开更新固件页面,如图所示选择对应的固件,AETH743Basic和对应的版本,记得勾选清空所有资料。

点击右下角的从网络加载固件,等固件加载完毕后点击烧写固件即可。
但需要注意的是国内 GitHub 的下载服务非常不稳定可能无法加载,这时你可以使用开头的固件下载链接手动下载对应的固件,然后点击从本地电脑加载固件,从资源管理器里找到你下载的固件文件,然后点击烧写固件。

等待进度条显示烧录成功。
这时你会听到硬件连接电脑的叮咚提示音,注意看界面的右上角,COM口选择框里出现如图所示的新选项,点击连接。
如果一直无法连接就试试其他COM编号,或者重启地面站。
2. 初始设置
当你的飞控已将成功的连接到地面站后,首次连接会弹出以下界面。

中文翻译对照:
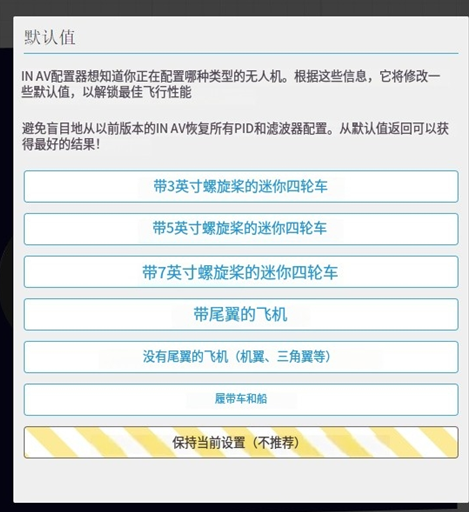
选择倒数第三个即带尾翼的飞机,飞控可能会重启重新连接地面站然后再次连接会弹出以下界面,在这里设置你实际连接接收机的UART端口和协议建议UART6,紧接着还会弹出GPS的端口和协议设置,很具你的实际情况来,一般GPS建议连接在UART4上选择默认的UBOX协议即可。点击右下角的NEXT会保存重启。
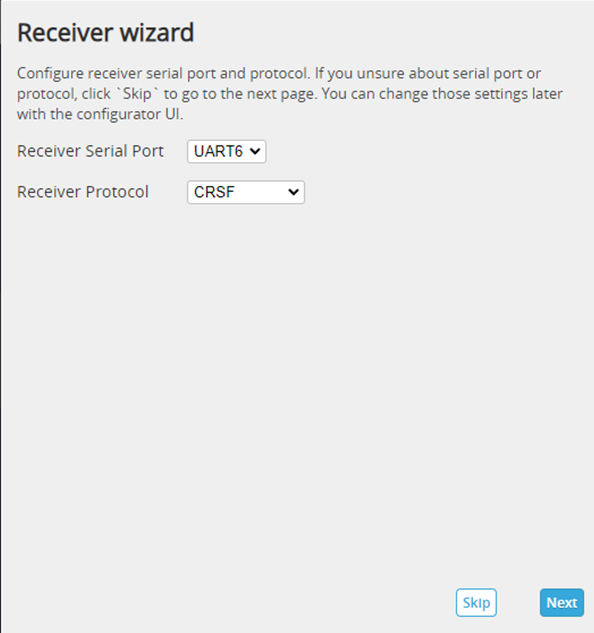
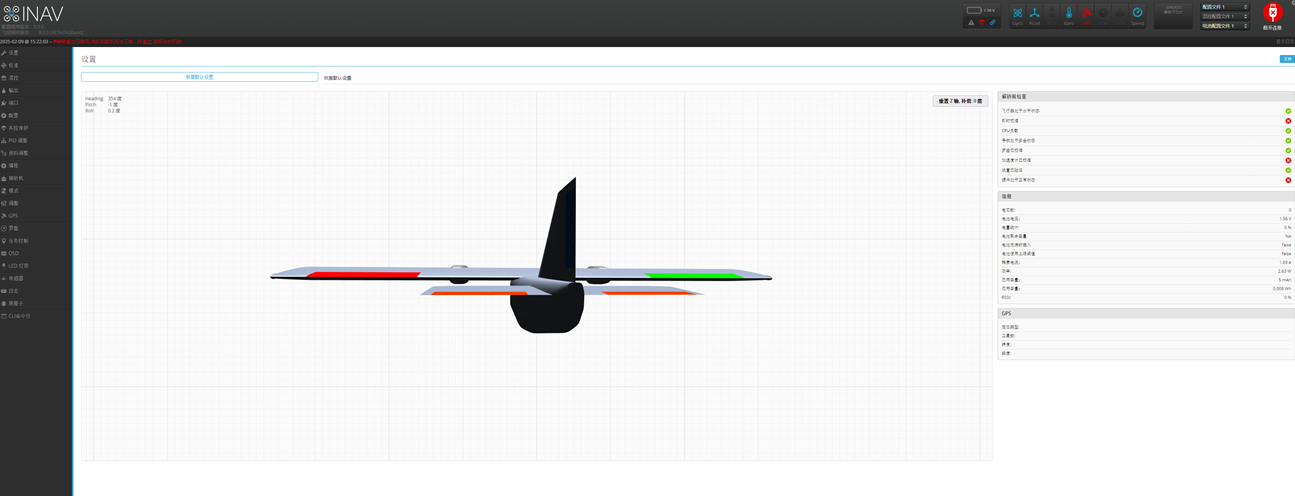
再次连接电脑就是以下飞机姿态示意模型的界面了
3. 校准加速度计
我们这时点击打开左侧的校准选项卡
点击校准加速度计
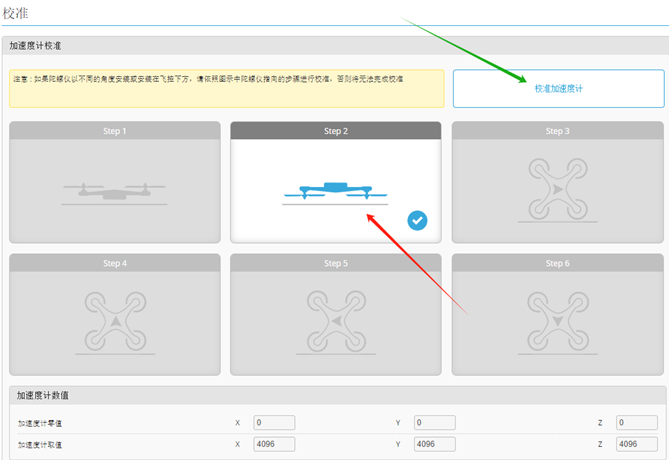
由于该飞控的PMU是安装在PCB下层倒置的,第一个校准面我建议底部朝上。
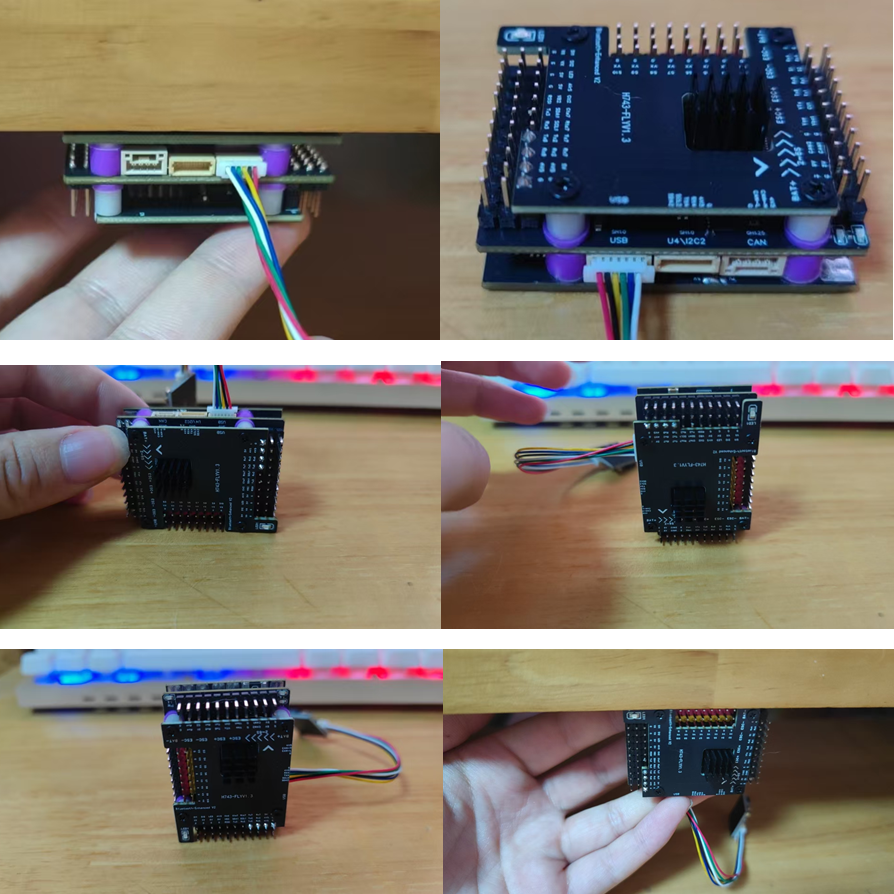
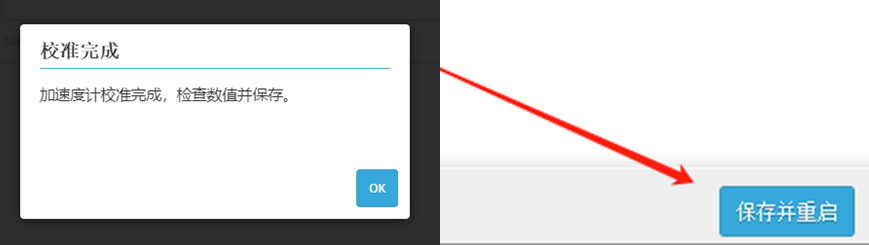
然后按照示意图每个面都校准一遍,地面站会根据你摆放的姿态自动识别你要校准的面。所有面校准完毕后会弹出以下界面点击OK后,点击右下角的保存重启
4. 数字天空端O3/O4图传OSD设置
在左侧选项卡找到端口 
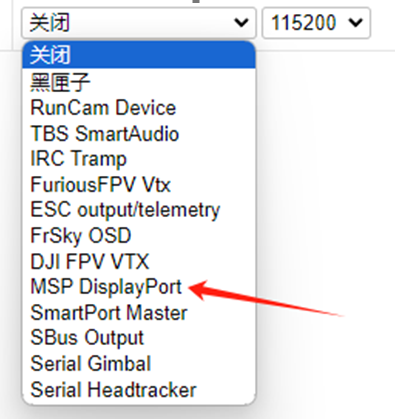
打开后是这样的,点击你要连接数字天空端的UART端口右侧的外设我这里是UART8,因为这个飞控没有专门的数字图传小白插口,我建议用杜邦线接在TX8/RX8上,方便从旁边的9V BEC针脚取电,另外这里靠近TX1/RX1也方便连接天空端自带的S.BUS接收机(固定翼上并不建议),由于H743自带反相器所以并不需要和F4飞控一样专门去接S.BUS针脚。

选择其中的MSP DisplayPort选项!注意!
是MSP DisplayPort!
是MSP DisplayPort!
是MSP DisplayPort!
不是DJI FPV VTX!!!!!!!!!!
不是DJI FPV VTX!!!!!!!!!!
不是DJI FPV VTX!!!!!!!!!!
然后我们打开左侧的OSD页面 
在该页面的右上角有一个视频制式,如图选择对应的制式
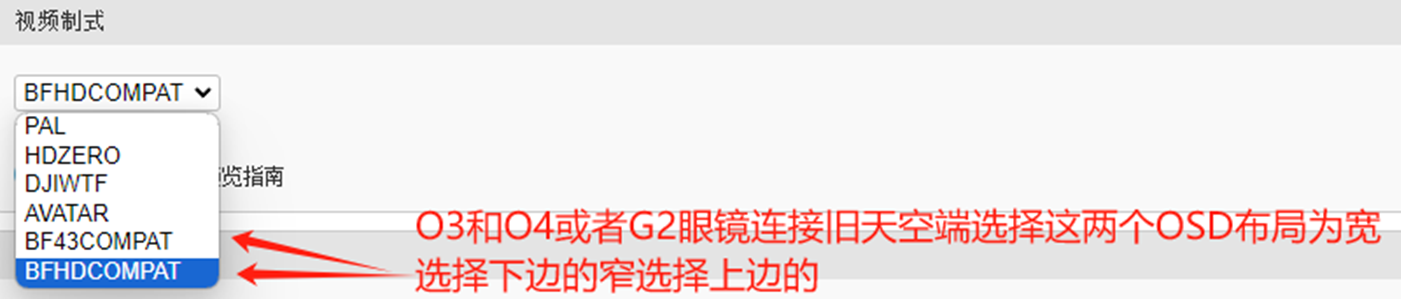
到此为止如果你的天空端已经连接眼镜里设置的没毛病的话并且通电那么应该是能正常的显示OSD了。
如果你懒得布置OSD界面,可以试试用我的。在  中粘贴即可:
中粘贴即可:
osd_layout 0 0 36 8 H
osd_layout 0 1 37 9 V
osd_layout 0 2 0 0 V
osd_layout 0 3 8 6 V
osd_layout 0 4 8 6 V
osd_layout 0 7 25 16 V
osd_layout 0 8 39 2 V
osd_layout 0 9 2 10 V
osd_layout 0 11 37 11 V
osd_layout 0 12 44 11 V
osd_layout 0 13 12 11 V
osd_layout 0 14 41 5 V
osd_layout 0 15 11 9 V
osd_layout 0 20 1 0 V
osd_layout 0 21 1 1 V
osd_layout 0 22 26 13 V
osd_layout 0 23 26 14 V
osd_layout 0 24 24 1 V
osd_layout 0 25 36 8 V
osd_layout 0 27 3 9 V
osd_layout 0 28 37 12 V
osd_layout 0 30 13 17 V
osd_layout 0 32 37 10 V
osd_layout 0 34 22 0 V
osd_layout 0 40 3 16 V
osd_layout 0 41 14 8 H
osd_layout 0 45 0 0 V
osd_layout 0 46 43 17 V
osd_layout 0 85 12 10 V
osd_layout 0 86 47 15 H
osd_layout 0 87 44 16 V
osd_layout 0 88 45 15 H
osd_layout 0 96 3 11 V
osd_layout 0 100 3 17 V
osd_layout 0 109 43 6 V
osd_layout 0 110 43 7 V
osd_layout 0 111 43 8 V
osd_layout 0 112 43 9 V
osd_layout 0 119 39 0 V
osd_layout 0 120 14 8 H
osd_layout 0 124 12 13 V
osd_layout 0 126 44 15 V
osd_layout 0 129 0 8 H
osd_layout 0 130 4 7 H
osd_layout 0 142 39 1 V
osd_layout 0 143 14 7 H
osd_layout 0 146 35 1 H
Save
5. 模式设置
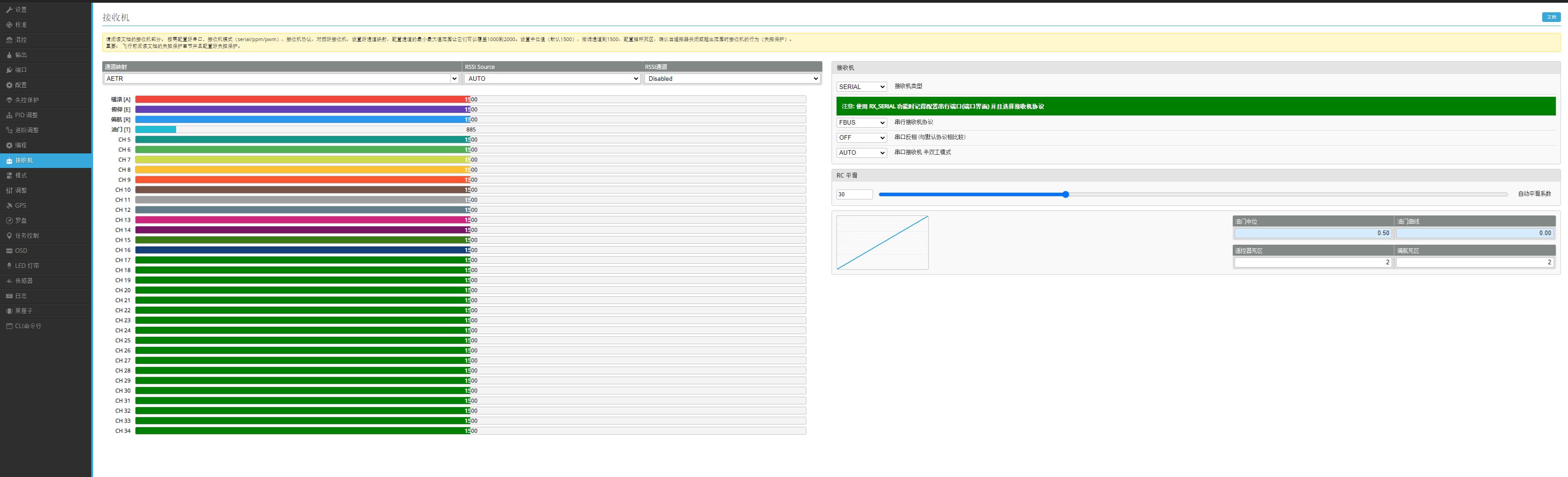
来到接收机页面晃动自己的摇杆 检查是否有反应,如果初始设置向导那里没搞错的的话应该就没问题,S.BUS接收可能因为串口反向设置错误而没有反应,修改这个选项为ON一般可以解决,半双工这里选择Off即可,设置正确后点击保存重启。
接下来我们来到模式页面,我们需要在遥控器上设置至少两个最基本的辅助开关通道,一个用来解锁一个用来设置模式。如果是垂起我建议至少3个辅助通道,用于切换构型的开关一定要用三段式的。

位置保持只有在多轴的混控配置激活的情况下才会出现

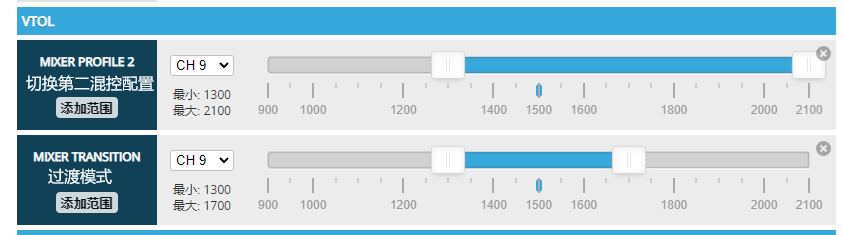
下图是垂起飞机的关键,这两个模式一定要设置对,如果不需要垂起则不用设置。
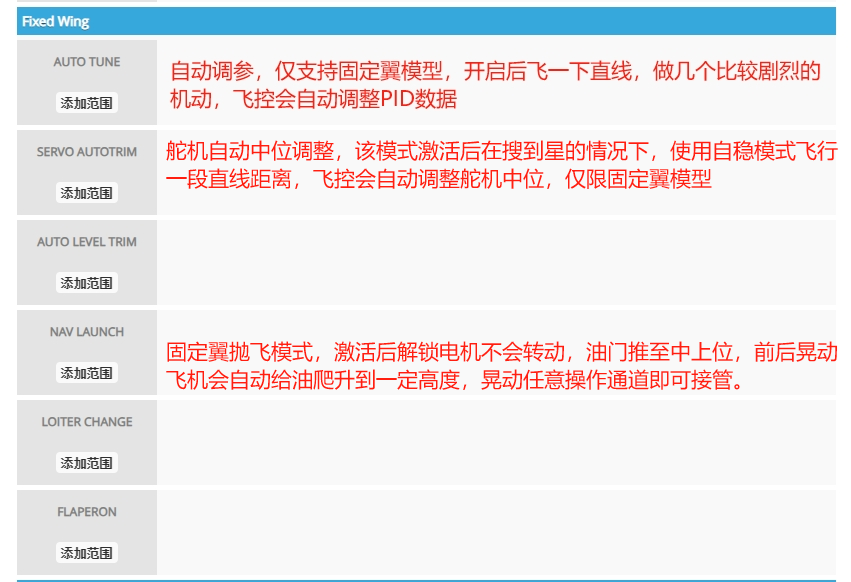
由于我喜欢从多轴模式到固定翼全程都使用手动Acro飞行,所以我的模式设置偏向个人风格一些,不建议抄作业,只介绍这些模式的功能,大家根据自己的习惯来就好,如果玩过BF穿越机的话,这些模式的设置可能看起来并不是太难理解,如果是从AP转过来的可能会觉得蒙,我的建议是按照自己擅长的选择适合自己的固件AP玩得转就没必要折腾INAV了,除非你也喜欢飞手动。
关于垂起固定翼飞行中的注意事项与技巧,由于INAV的垂起就是两套配置文件来回切换实现的,所以并不会和AP那么智能。你需要了解固定翼飞机的飞行原理,并最好有熟练地飞行经验,在多轴模式下尽量避免快速水平下高与跳过过渡模式直接切换到固定翼模式的错误操作,这样会导致Y3结构倾转垂起的飞机后空翻炸机,或导致四加一结构的飞机失速直接栽下来。
固定翼飞机需要获得一定的空速才能稳定的飞行,这就是过渡模式的作用,即在该模式下多轴构型的所有电机都会正常工作调整姿态,倾转结构的飞机会按照设定的角度偏转推力使飞机获得前进的空速,一般达到40km/h速度时就可以切换到固定翼模式了,根据机型不同这个速度或高或低但快一些更好。而降落的时候建议按照正常固定翼下滑航线进场并减小推力减速,在靠近着陆位置速度接近失速前留有一定冗余时直接切换到多轴模式降落,这样非常省电。
6. 混控
这里只是提供一个常规Y3布局垂起固定翼的混控案例,由于我手头没有类似布局的飞机,仅作为逻辑参考。
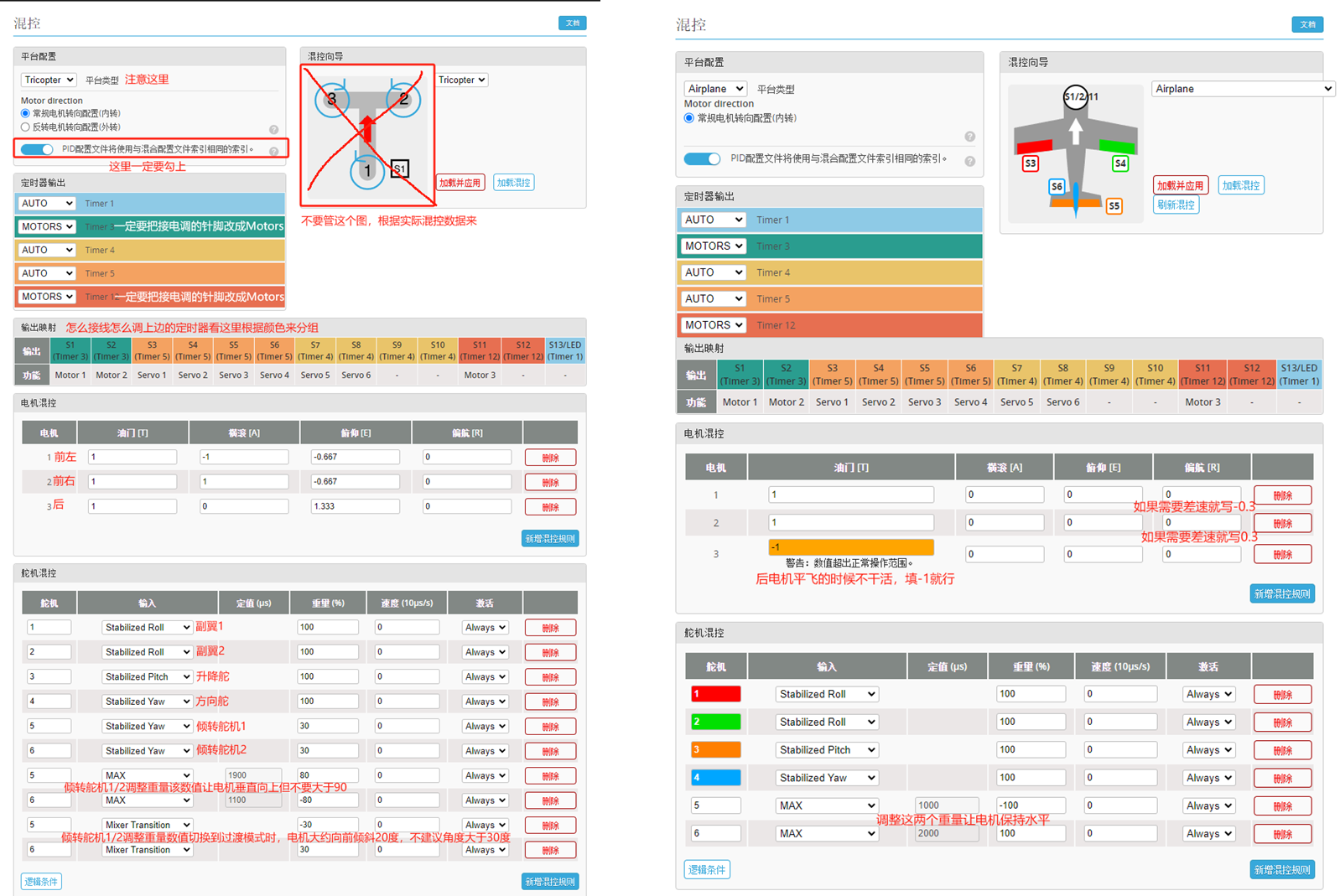
混控配置文件在这里切换

在这之前你可能注意到上方提示 
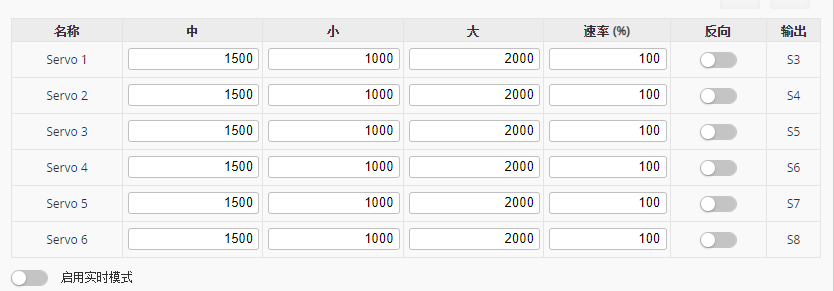
我们在输出页面进行修改 

通电电机和舵机就正常可以工作了
舵机的行程量和中位点正反向也在这个页面修改一般舵机能识别的范围最低500最大2500,中位点先取最大最小值的平均数就可以即相加除2。
7. 感谢
感谢“飞天陈皮皮”编写此文档。