第五章:通道配置、舵机设置及检查、电调校准
5.输出设置
5.1通道配置
进入SERVO OUTPUT我们可以对飞控各通道进行设置,AP固件参考的是多轴Y-3的电机定义,需注意左前电机为MOTOR2,右前电机为MOTOR1,后电机为MOTOR4,如下图所示,转向可以不做参考,切不可设置成MOTO1\MOTOR2\MOTOR3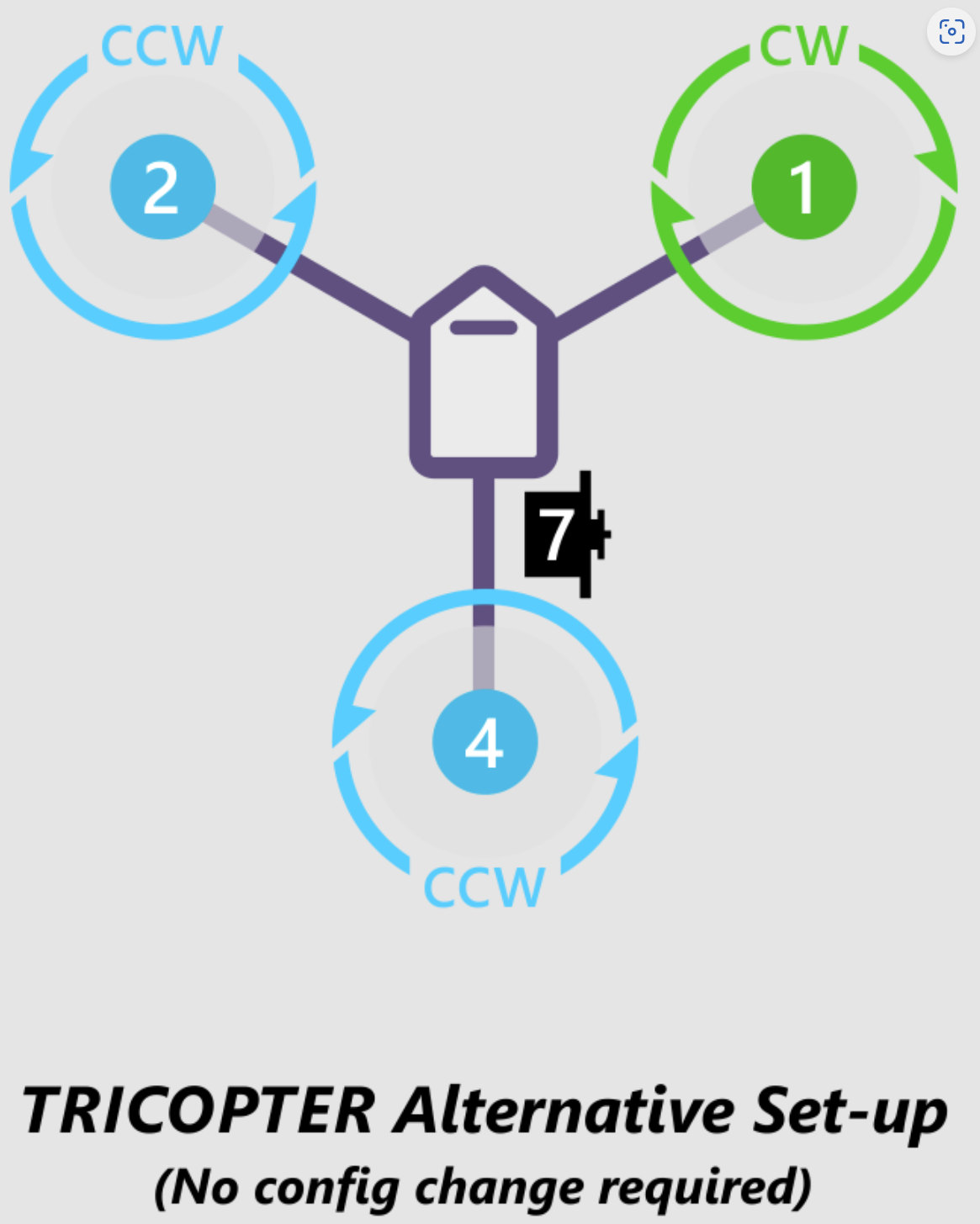
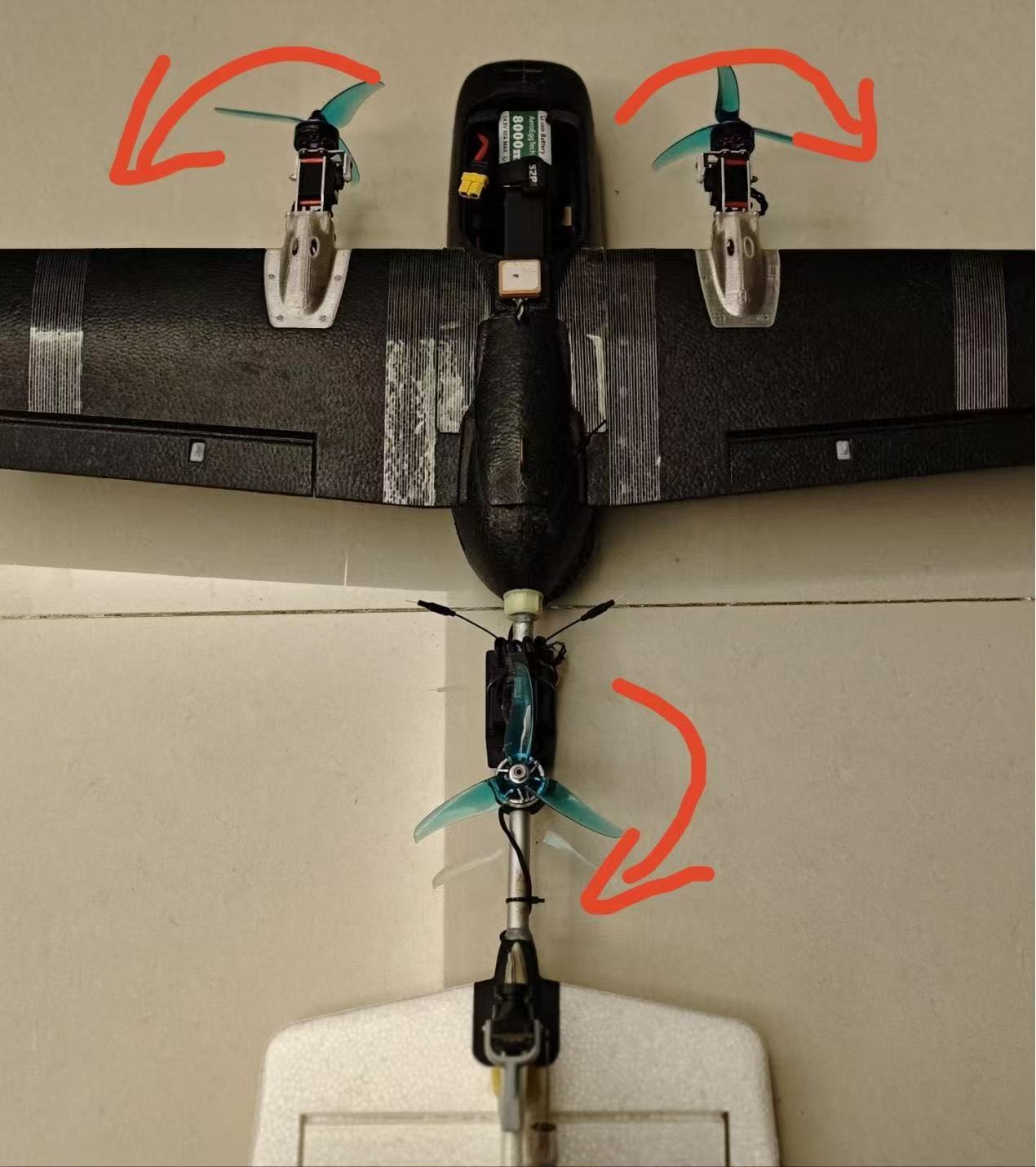
以我目前所调试的刺客T1为例,根据我个人在飞控端的接线;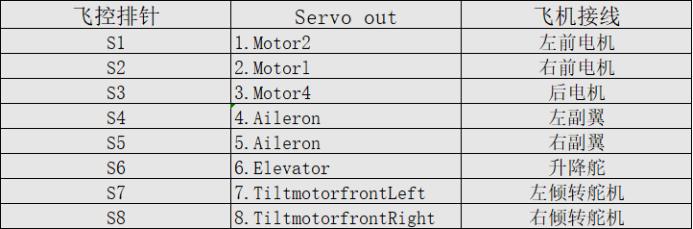
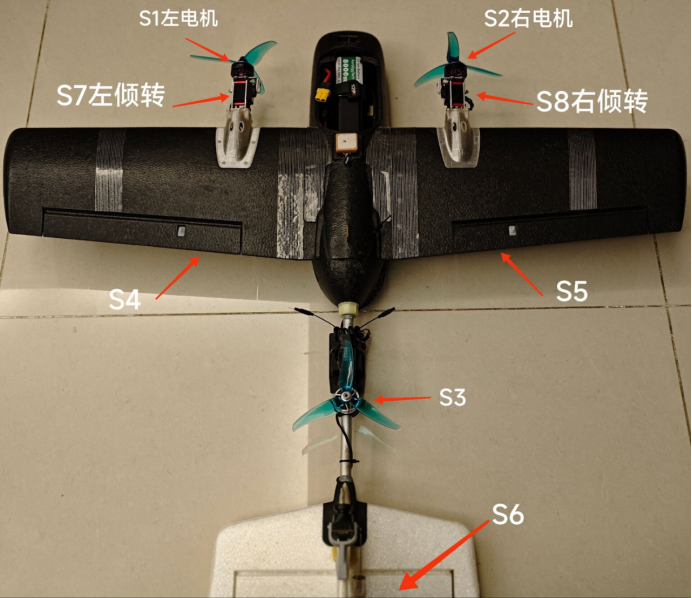
(飞控自带BEC,如电调也自带BEC需把中间电压线挑出来并做好绝缘,防止飞行途中晃动导致接触到导体,导致短路)
根据接线选择以下通道,作为飞机舵面及油门。
5.2.舵机及舵面检查
5.2.1倾转舵机检查
当我们处于Q_stabilize模式时,两个倾转舵机的角度应该是垂直90度的,如下图所示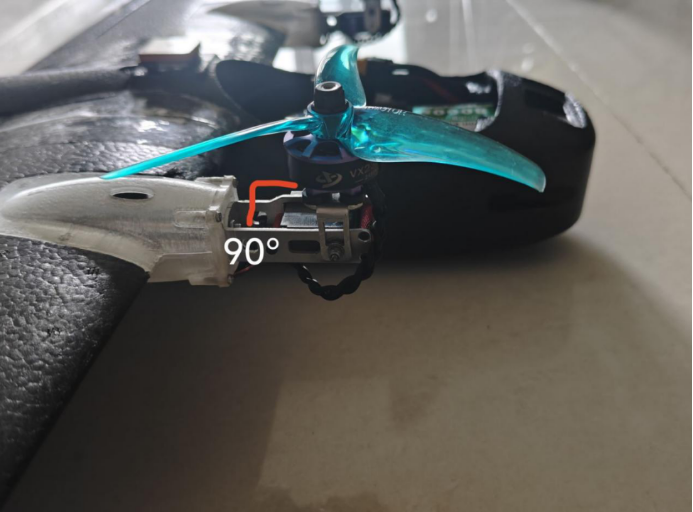
地面站OUTPUT界面如下图所示,我们可以看到在Q_stabilize模式时,左倾转舵机的PWM值是处于低位,右倾转舵机的PWM值处于高位。
这个根据实际情况去调整,不一定每一台飞机在多轴模式下左倾转舵机PWM值都是处于低位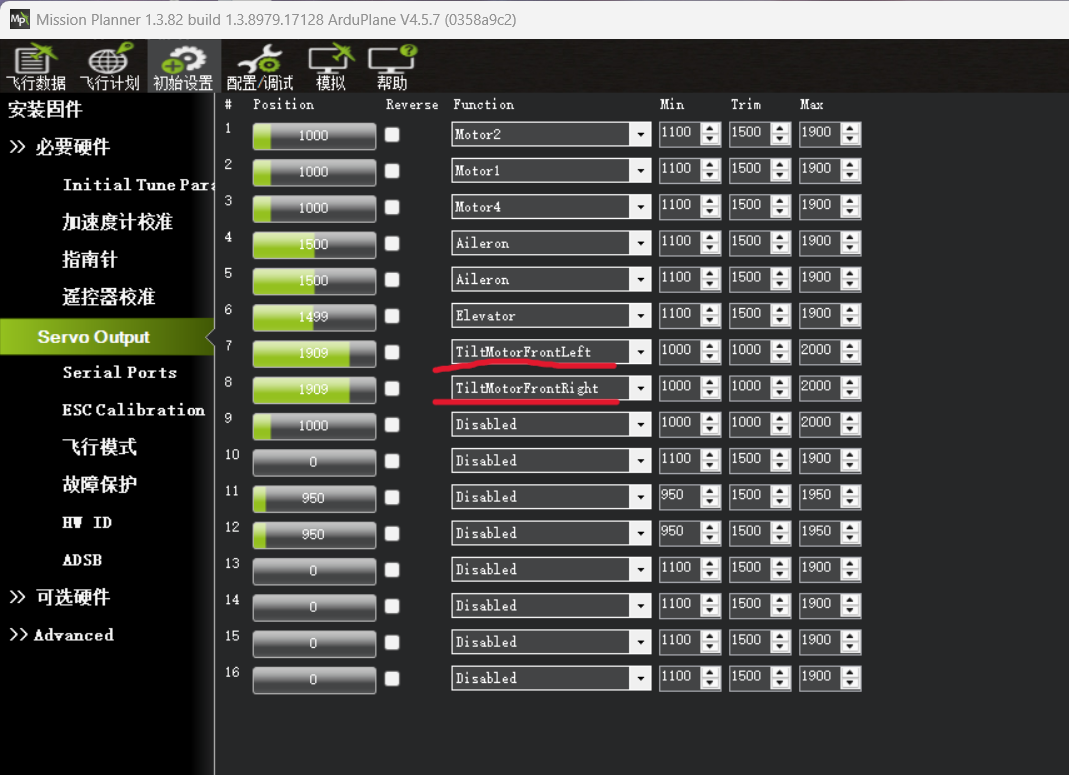
当出现一个舵机垂直90°,另一个舵机平行180°时,只需将错误的舵机对应的通道勾选 Reverse(反向)即可。 当两个倾转舵机都处于竖起来,但是没有完全垂直的情况下,通过调整7通道的min值和8通道max值调至垂直
示例:
当做左倾转舵机不垂直切小于90度时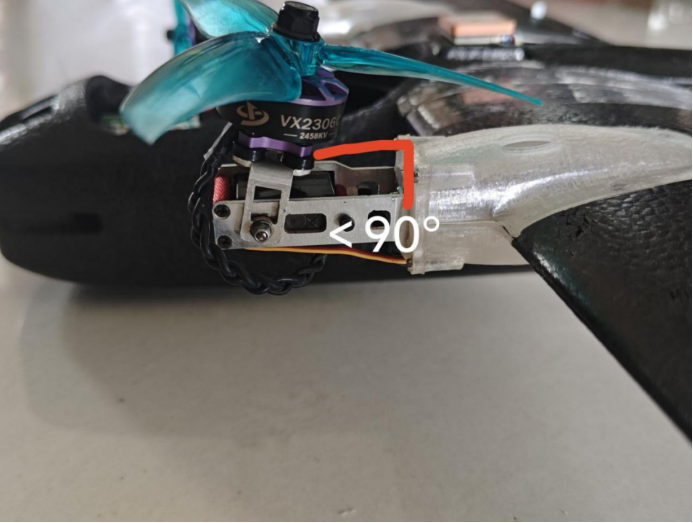
我们可以增加7通道min的值让其垂直,反之当左倾转舵机大于90度时,则需要减小7通min的值
同理,当右倾转舵机出现不垂直时,调整8通的max值即可
当我们处于FBWA模式时,两个倾转舵机是平行180°的,如下图所示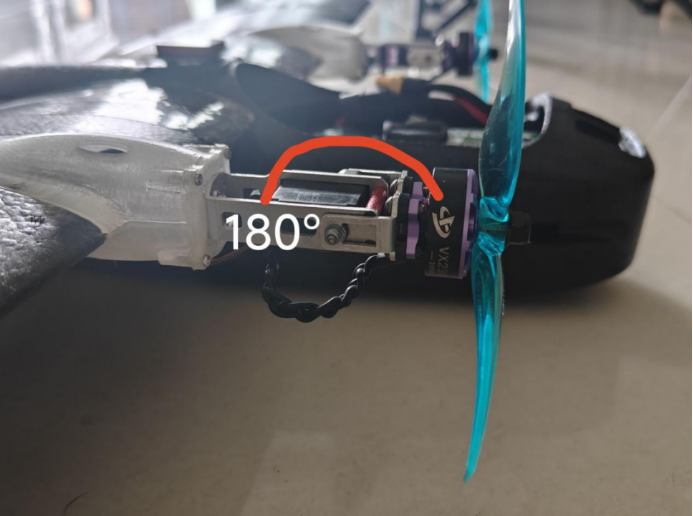
地面站OUTPUT显示如下,我们可以看到在FBWA模式时,左倾转舵机的PWM值是处于高位,右倾转舵机的PWM值处于低位。 与Q_stabilize模式下左右倾转舵机不垂直的调整方法一致,FBWA模式下调整的是7通道左倾转舵机的最大值和8通右倾转舵机的最小值
示例:
左倾转舵机小于180°时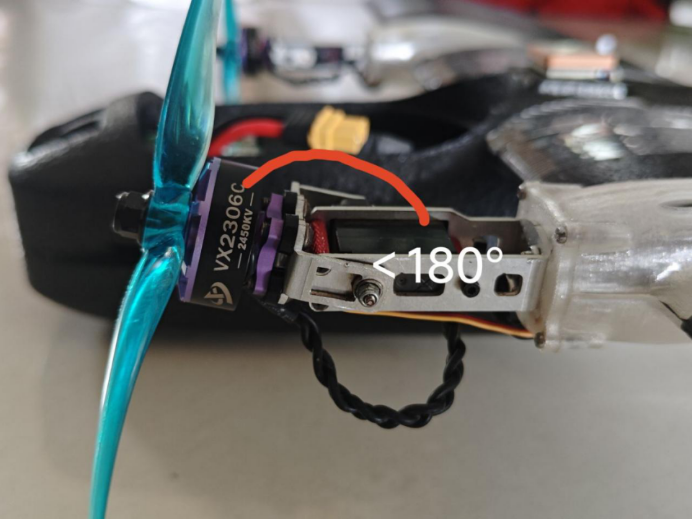
我们需要增加7通道的max值,反之左倾转舵机大于180°时则减小7通道的max值
同理,当右倾转舵机出现不垂直时,调整8通的min值即可
总的来说,我们可以通过调整不同模式下的PWM信号的最大和最小占空比值来精确控制舵机的位置或角度。这可以通过MP地面站的输出界面进行直观的调整和优化。
当我们调整min、max值时,地面站可能会弹出超出限制的提示,点击确认即可。
5.2.2固定翼舵面检查
详细可见AP快速调参指南:
https://doc.aeroeggtech.com/books/aet-h743-basic-ardupilot/page/aet-h743-ardupilot
(1)在遥控上切换到FBWA模式,进行舵面检查,通过打俯仰,升降,方向,检查飞机的舵面反馈是否正确。如出现舵面反向,可在“SERVO OUTPUT”界面找到对应通道勾选REVERSE即可。
(2)进行舵面辅助修正方向检查,我们将飞机任意摆放模拟空中姿态,例如将飞机低头,观察舵面是否会翘起,以此帮助飞机抬头,恢复平飞姿态,以此类推测试滚转,偏航;
(此处检查飞控输出与舵机的输出是否一致,如果还是出现舵面反馈不一致的情况,则需回到 2.1.遥控器校准 中重新检查,以及检查舵机接线是否准确)
5.3电调校准
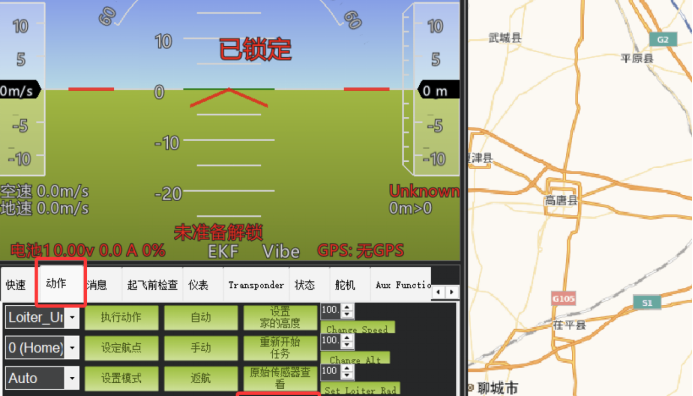
进入飞行数据界面,找到动作栏,点击解锁。
a.确认遥控器已经校准了,遥控器切到Q_stabilize模式,油门推到最高
b.点击Force Arm,即可强制解锁(注意测试时请勿装桨)
c.此时给飞控上电池供电,电调“滴滴”两声后,油门收到最低
d.电调校准完成,可轻推油门查看电机转向与桨是否匹配。(如不匹配,可任意调转两根错误转向的电机的电调线,将其反向)