第三章:垂起设置
3.垂起设置
3.1垂起预调参
打开全部参数树搜索并设置Q_ENABLE =1
开启vtol模式,=1为打开, 默认是=0 关闭的 设置完这个 垂起部分的参数才会出现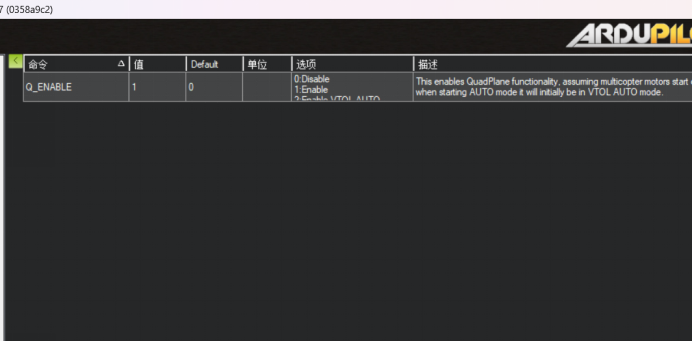
然后地面站会要求你重新加载参数,这个时候要完全给飞控断电重启,重连地面站,并继续修改
QFRAMECLASS=7
多轴类型 Y3=7
QFRAMETYPE=1
机架类型,改成X型就行 通常=1
QTILTENABLE=1
开启倾转 不开的话下面的MASK和TYPE是没有的 更改=1
然后地面站会要求重新加载参数,这个时候要完全给飞控断电重启重连地面站,并继续修改
QTILTTYPE=2
启动矢量推力控制:0关闭1单倾转 2矢量控制倾转 更改=2
QTILTMASK=3
倾转的电机,是特殊进制的代码 更改=3
3.2.飞行模式设置
进入飞行模式设置,通过下拉菜单选择适合的模式,根据个人偏好进行设置。我们建议首先设置Q_stabilize模式类似多轴的半自稳和固定翼自稳模式(FBWA),以便继续调试。
默认情况下,飞行模式设置在通道8上。如果使用三段开关,将飞行模式1和2设为相同的模式即可。以下是模式设置的示意图,仅供参考。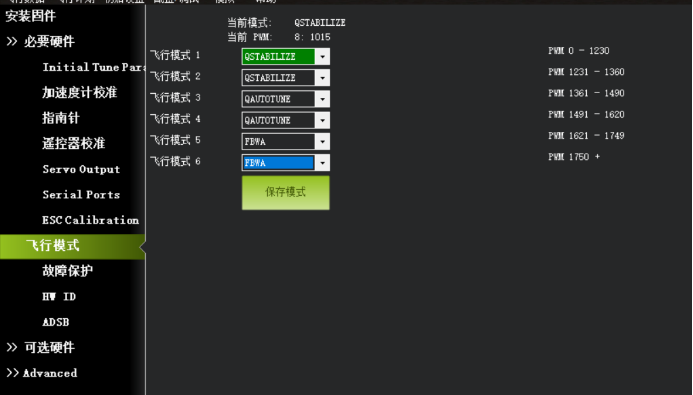
完成后点击保存模式-Complete;
如需使用6段开关控制,可参考以下链接: https://doc.aeroeggtech.com/books/aet-h743-basic-ardupilot/page/aet-h743-ardupilot