空速计的连接与设置使用
此处我们使用Fapple空速计举例(使用MS4525D协议),空速计在机身上的安装请参考空速计安装使用说明,尽量减少机身湍流对空速计产生影响。 空速计的5V GND正常接到飞控的5V GND ,确保供电正常,空速计的SDA 、SCL分别接到飞控的SDA、SCL(UART4/I2C 2接口) 在全部参数表中搜索以下参数并对应修改: ARSPD_TYPE 1 MS4525选择1;如果是MS5525问商家。 ARSPD_OPTION 15 ARSPD_AUTOCAL 1 空中自动调参,大概飞15-20分钟 ARSPD_SKIPCAL 1 ARSPD_PIN 默认值15,模拟空速计。如果是数字空速计修改成65 ARSPD_RATIO 默认值1,自动校准后,会修改成实际值,校准完成后,手动将ARSPD_AUTOCAL自动调参修改成0
在OSD页面设置页面中,勾选 ASPD1,并拖拽至适合位置,写入即可
空速计工作状态检查
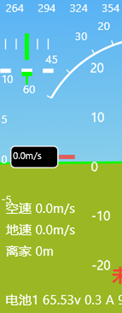
空速计与飞控连接状态正常,在地面站页面可以看到,如下图
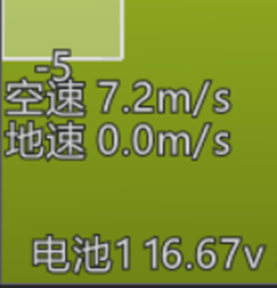
对空速计的动压口吹气,或者用空速计的动压口对着风扇吹来的风。观察地面站的空速数据是否有变化。如下图
空速计首飞需要进行一次基础校准,飞机上天后,切LOITER定点留待模式,飞机在当前高度进行定点盘旋。建议保留飞机盘旋5~10分钟,让飞控对空速计进行自动校准。 飞机正常降落后,连接地面站,关闭自动校准,参数为: ARSPD_AUTOCAL 2
此时完成空速计全部设置。
空速计的其他设置请参考空速计提供的响应参数。
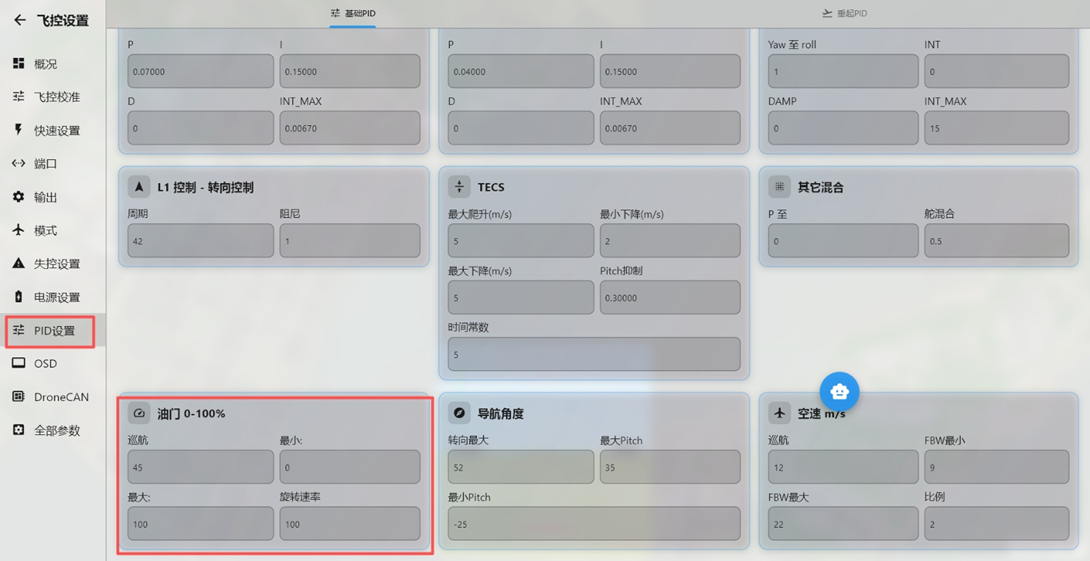
调整巡航油门 模友反馈,飞机在返航到头顶后,经常出现油门100%输出高速盘旋,为此我们建议在MP的基本调参页面中适当修改
【配置/调试】---【基本调参】---【油门0-100%】
巡航 设置为 32
最小 设置为 30
最大 设置为 80
旋转速率 设置为 70
此设置也会影响FBWA模式下最大油门输出,MANUAL模式不受此设置影响。