飞控接线
2.1. 飞蛋AET H743 Basic飞控接线图
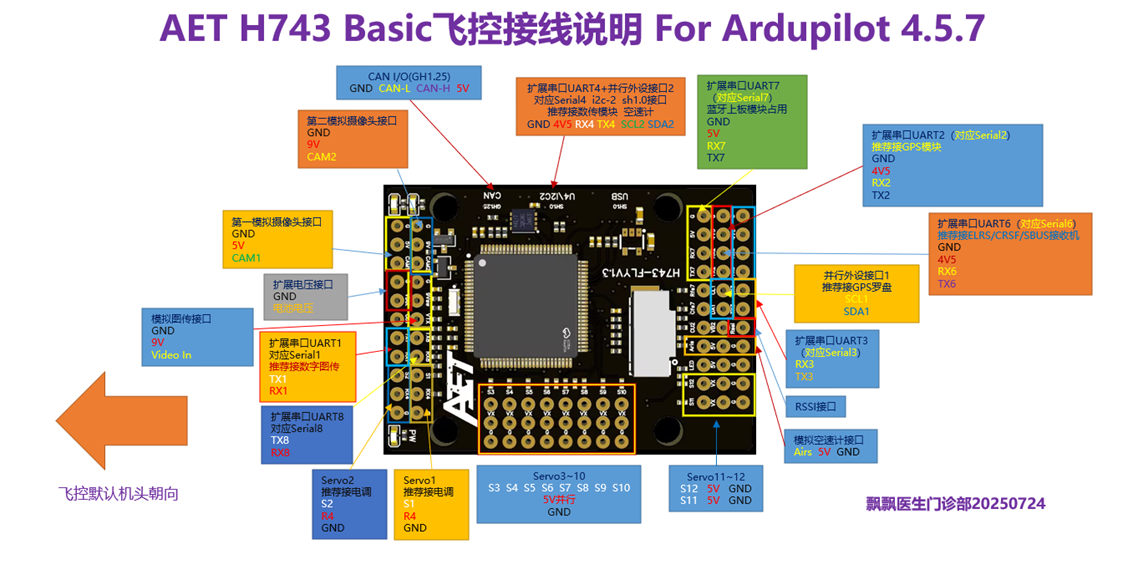 注意飞控的机头朝向,在ArduPilot固件的加速度计校准时,会需要分别左面朝下、右面朝下等。
注意飞控的机头朝向,在ArduPilot固件的加速度计校准时,会需要分别左面朝下、右面朝下等。
2.2. 常用外设示例 常见的外设有:GPS定位模块、SBUS接收机/ELRS接收机/黑羊CRSF接收机、数字图传天空端(包括大疆O3、O4、O4Pro;蜗牛Caddx Avatar系列;开源高清图传OpenIPC;思翼天空端、云卓天空端)、数字空速计、、光流测距仪等……
其中,GPS模块,SBUS接收机,ELRS接收机,黑羊CRSF接收机,数传模块,数字图传天空端为串口外设。 GPS模块的罗盘、数字空速计 ,为i2c并行接口外设。
使用模拟空速计i2c并行设备的玩家,可以接到飞控的SDA2、SCL2并口(可能需要手工改插针。详见本文第四章第12节。 本文连接示例: UART1接口,接数字图传天空端(思翼UART口,115200,MavLink2),
UART2接口,接GPS模块(uart2及i2c并行接口,38400,GPS),
UART4接口,接飞蛋进阶空速计(i2c并行接口,不用波特率及协议),
UART6接口,接ELRS接收机(思翼s.bus,115200,RCIN),
UART7接口,飞控板载蓝牙数传模块对应(115200,MavLink2),
UART8接口,接光流测距传感器(115200,MavLink1)。
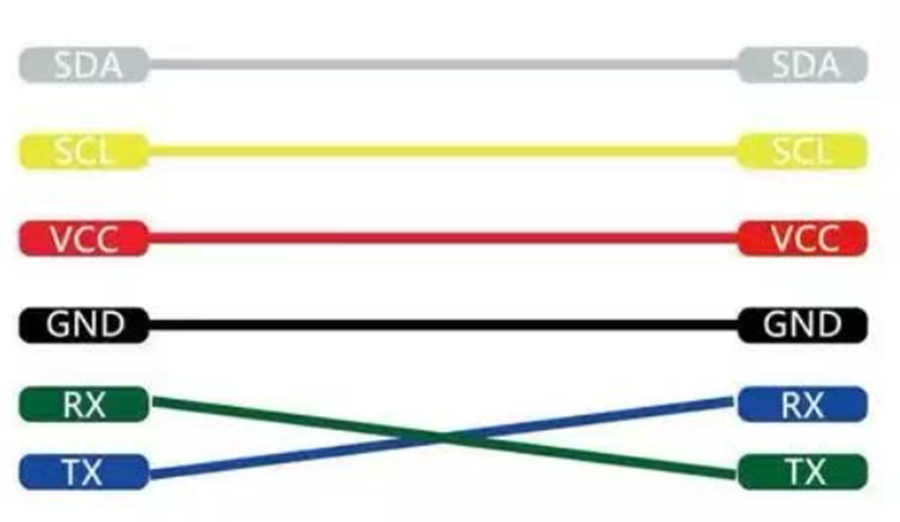
2.3. 串行总线接收机连接示范
连接UART6接口,如下图:
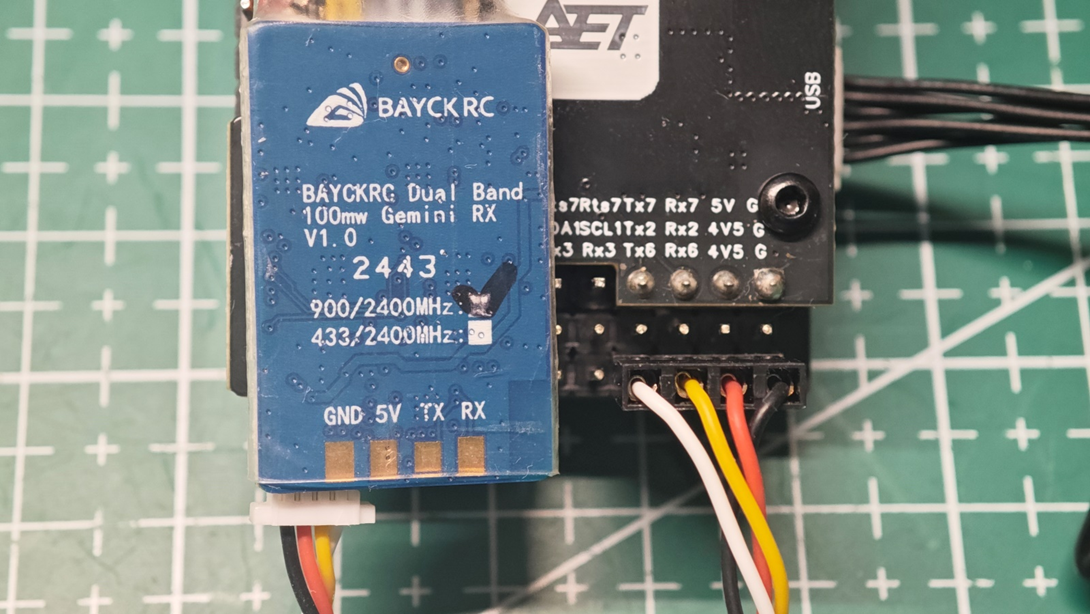
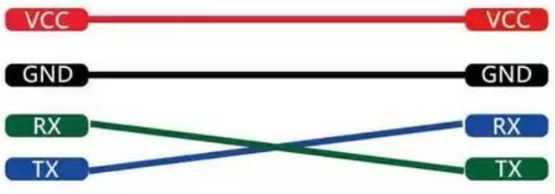
使用ELRS接收机、黑羊CRSF接收机,推荐与飞控H743的UART6端口连接,如上图(看字幕别看颜色) 接收机的R(或RX)连接飞控的Tx6
接收机的T(或TX)连接飞控的Rx6
接收机的V(或5V)连接飞控的4V5
接收机的G(或GND)连接飞控的G。
连接后需要在地面站的端口页面进行相对应设置
1.1. GPS模块(含电子罗盘)连接示范
连接飞控Uart2接口,如下图:
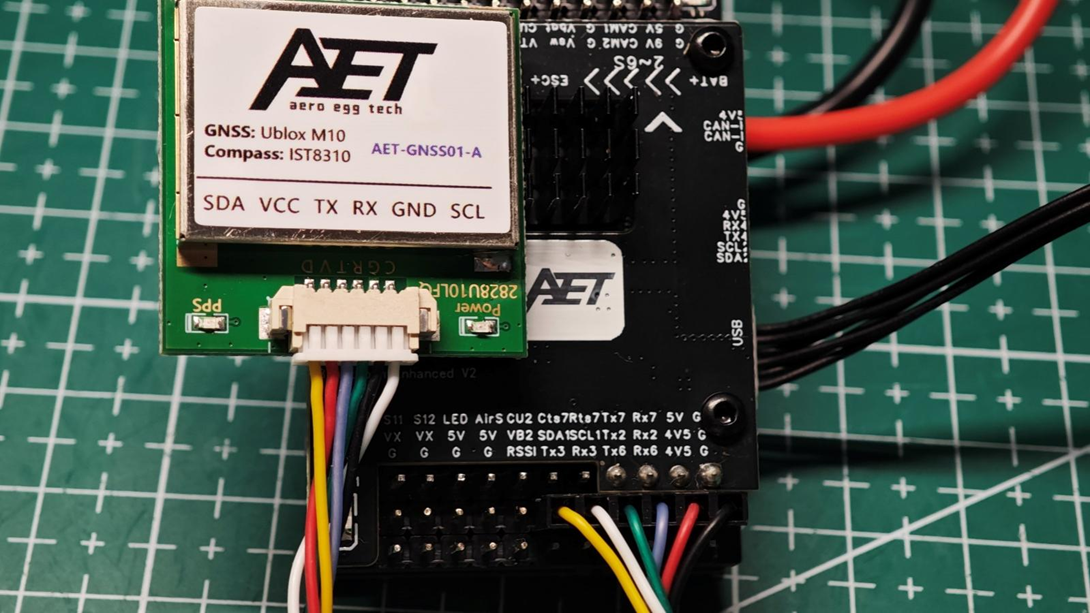
使用GPS模块,推荐与飞控的UART2端口连接,如上图。
GPS的R(或RX)连接飞控的TX2,GPS的T(或TX)连接飞控的RX2。
GPS的V(或5V)连接飞控的4V5,GPS的G(或GND)连接飞控的G。
GPS的SCL连接飞控的SCL1、GPS的SDA连接飞控的SDA1(CL、DA为并行总线i2c接口,接GPS带的电子罗盘。传统固定翼可不用选择安装电子罗盘。若GPS模块不带罗盘模块,CL、DA可无需连接) 连接后需要在地面站的端口页面进行相对应设置。
1.1. 数字天空端连接示范
连接Uart1接口,如下图:
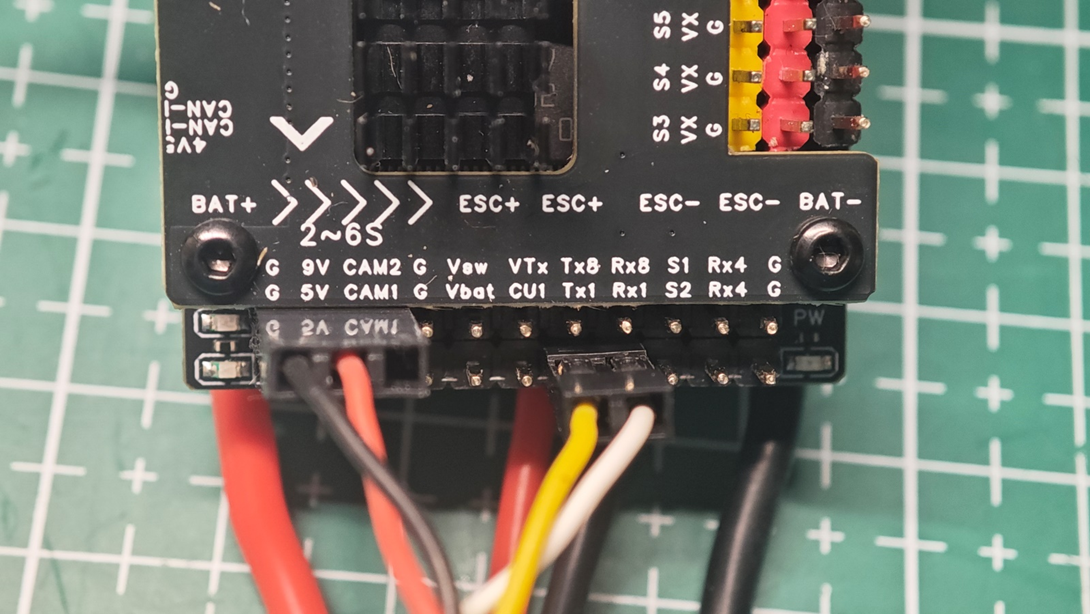
使用大疆数字天空端,推荐与飞控的TX1 RX1 9V GND接口(UART1端口)连接,
使用大疆数字天空端,推荐与飞控的TX1 RX1 9V GND接口(UART1端口)连接, 天空端的R(或RX)连接飞控的Tx1,天空端的T(或TX)连接飞控的Rx1。
天空端的V 连接飞控的9V,天空端的G(或GND)连接飞控的G。
由于大疆系列天空端内置与DJI FPV2遥控对频使用的SBUS接收机模块,不使用大疆FPV2遥控器的用户,天空端仅需要接4根线到飞控端
连接后需要在地面站的端口页面进行相对应设置。
1.3. 舵机连接示范
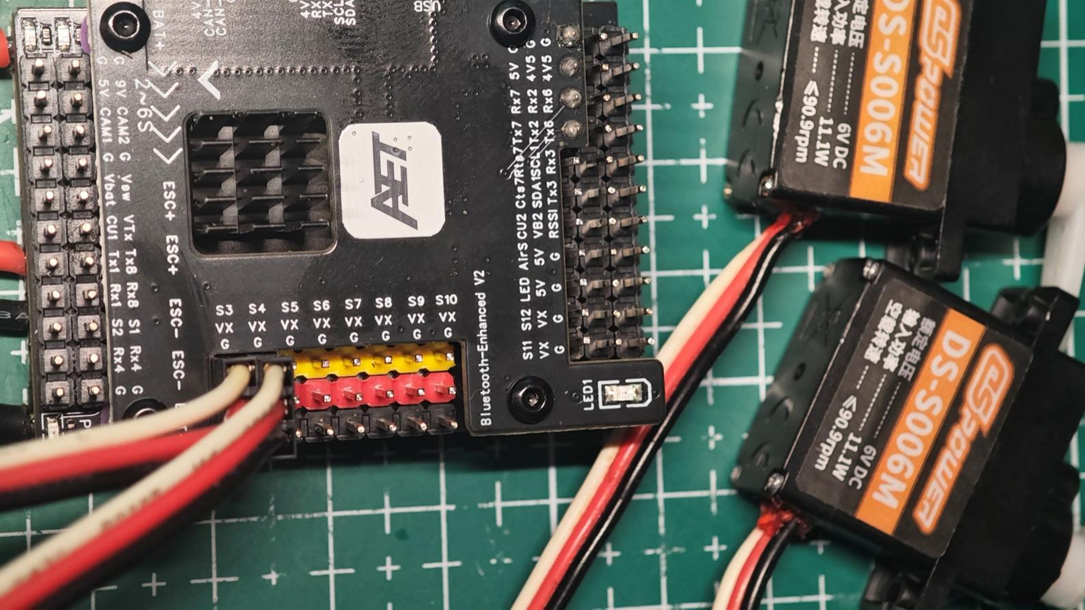
舵机接口一般为2.54杜邦3P接口,舵机线深色一般为G(GND)、红色或橙红色线为舵机供电正极5V,白色或橙黄色线为舵机控制信号线S。每个舵机分别连接飞控的S3~S12接口,不要将舵机线合并到一根再连接飞控。
飞控设置页面端口的相关自定义设置。
1.4. 电调信号线连接示范
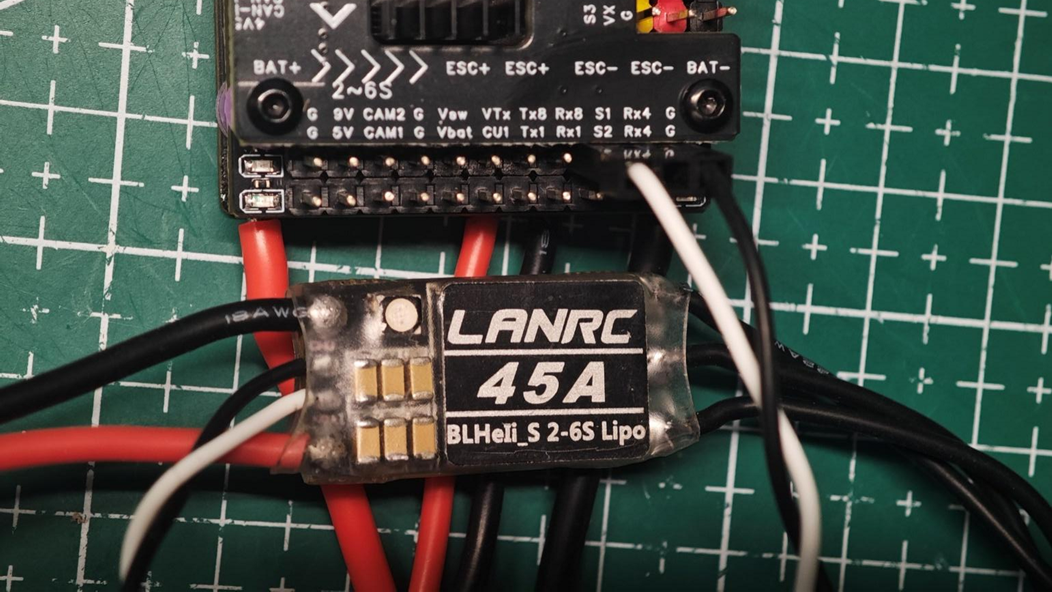 电调信号线接口一般为2.54杜邦3P接口(但杜邦3P接口的中间一般空置),信号线深色或黑色一般为G(GND),对应连接飞控的S1~S12接口,浅色或白色为电调控制信号线S。
电调信号线接口一般为2.54杜邦3P接口(但杜邦3P接口的中间一般空置),信号线深色或黑色一般为G(GND),对应连接飞控的S1~S12接口,浅色或白色为电调控制信号线S。
部分带有内置BEC 5V供电的电调(杜邦3P接口的中间线非空置,从电调引出)
电调通电后信号线中间的5V电压输出容易与飞控内置的5V舵机供电BEC模块冲突,建议用户提前把此类电调信号线的5V线断开(或剪短),不要接入飞控。
对应飞控设置页面AGC端口:的的相关自定义设置。